Aus RN-Wissen.de

Diese Spezialseite listet alle hochgeladenen Dateien auf.
Erste Seite |
Vorherige Seite |
Nächste Seite |
Letzte Seite |
| Datum | Name | Vorschaubild | Größe | Benutzer | Beschreibung | Versionen |
|---|---|---|---|---|---|---|
| 20:32, 16. Mär. 2013 | MultiIO JPdef 2.png (Datei) |  |
94 KB | Dirk | Standardstellung der Jumper auf der MultiIO | 2 |
| 22:55, 16. Mär. 2013 | MultiIO J IO-Mxxx 2.PNG (Datei) |  |
6 KB | Dirk | GPS-Modul von IO-Mxxx abtrennen | 2 |
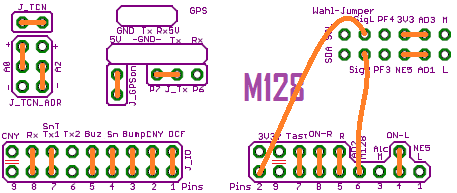
| 20:35, 17. Mär. 2013 | MultiIO IO-JUMPER AB M128.PNG (Datei) |  |
24 KB | Dirk | Jumperstellung für analoge Bumper Board Sensoren | 1 |
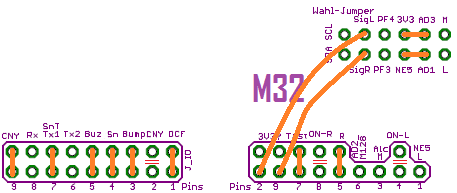
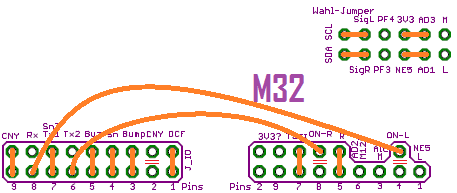
| 21:04, 17. Mär. 2013 | MultiIO IO-JUMPER AB M32.PNG (Datei) |  |
18 KB | Dirk | Analoge Bumper Sensoren anschliessen | 1 |
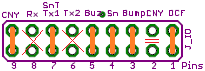
| 21:24, 17. Mär. 2013 | MultiIO IO-JUMPER BB M32.PNG (Datei) |  |
18 KB | Dirk | Bumper Taster anschliessen | 1 |
| 08:03, 20. Mär. 2013 | Zusammenhang 3Hall.png (Datei) |  |
20 KB | Listrik | 1 | |
| 08:03, 20. Mär. 2013 | Zusammenhang 4Hall.png (Datei) |  |
58 KB | Listrik | 1 | |
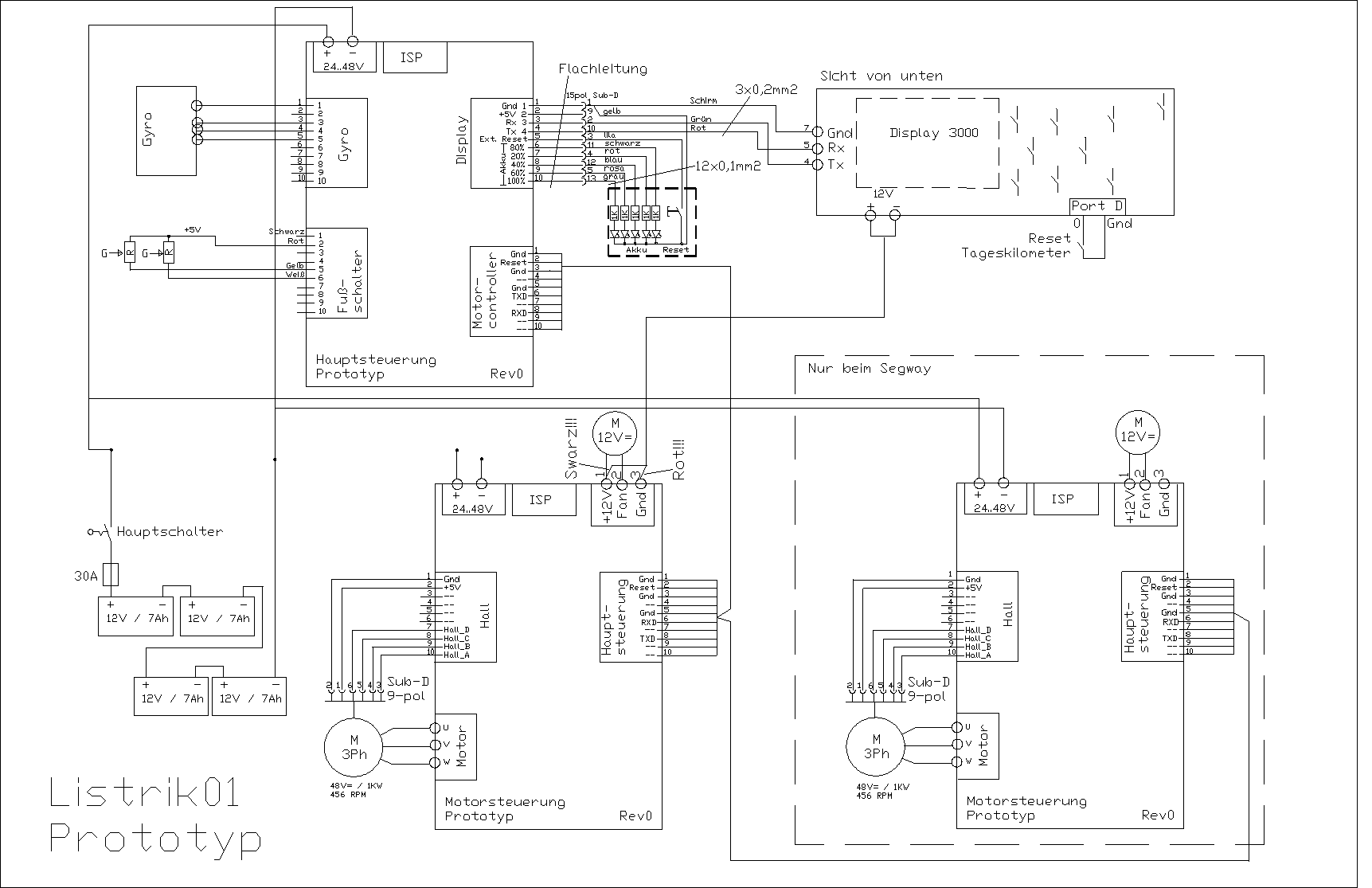
| 08:16, 20. Mär. 2013 | Listrik01-Verdrahtung Prototyp.png (Datei) |  |
34 KB | Listrik | 4 | |
| 08:19, 20. Mär. 2013 | Verdrahtung Prototyp.png (Datei) |  |
34 KB | Listrik | 2 | |
| 08:21, 20. Mär. 2013 | Verdrahtung Prototyp1.png (Datei) |  |
34 KB | Listrik | 1 | |
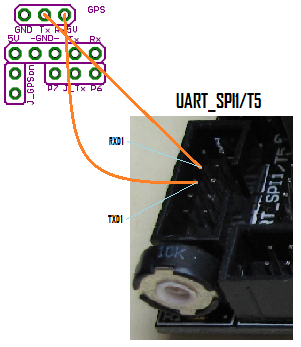
| 22:20, 22. Mär. 2013 | M256 UART1-GPS.PNG (Datei) |  |
63 KB | Dirk | M256: GPS-UART1-Verbindung | 1 |
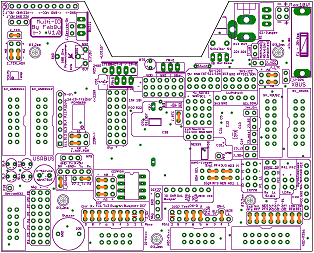
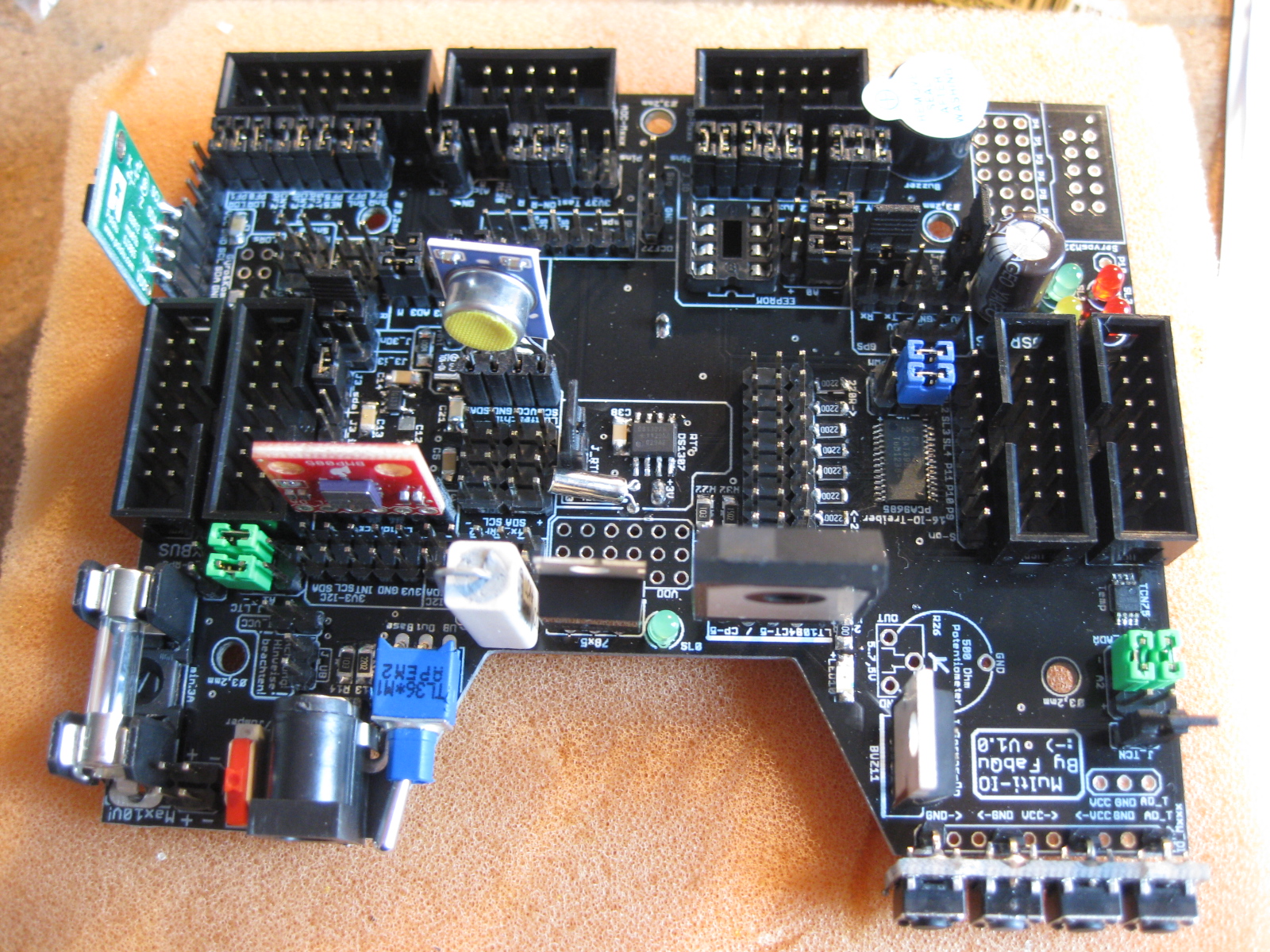
| 10:47, 27. Mär. 2013 | Multi-IO Gesamtansicht.jpg (Datei) |  |
1,11 MB | Fabqu | Dies ist die Multi-IO, fertig aufgebaut und mit einigen erweiterbaren Sensoren (Luftdruck, Luftfeuchtigkeit und 9D-Kompass) | 1 |
| 11:27, 27. Mär. 2013 | Anschlüsse.jpg (Datei) |  |
69 KB | Fabqu | Anschlussmöglichkeiten anderer RP6-Module, hier der M256 mit allen drei Anschlüssen (ADC_IO1, IO_PWM/T2/T3 und ADC_IO2/CMP) | 1 |
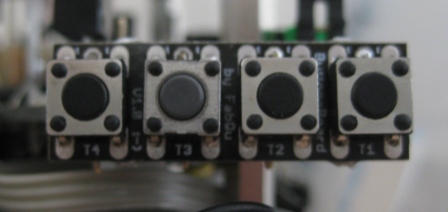
| 11:29, 27. Mär. 2013 | Tasterpoard.jpeg (Datei) |  |
44 KB | Fabqu | Das Tasterboard mit den vier Tastern, auf der Hauptplatine befestigt | 1 |
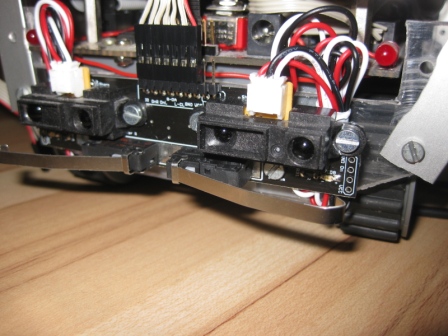
| 11:34, 27. Mär. 2013 | Bumperboard.jpeg (Datei) |  |
90 KB | Fabqu | Das zur Multi-IO gehörende Bumperboard am Heck des RP6 befestigt. Aufmontiert sind die beiden Bumper sowie zwei analoge Sharp GP2D12-IR-Abstandssensoren. | 1 |
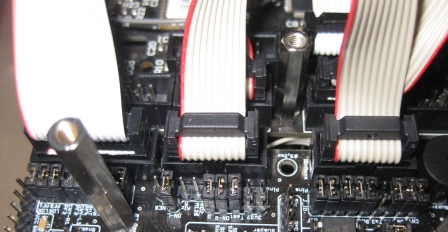
| 11:36, 27. Mär. 2013 | Anschluss Bumper.jpeg (Datei) |  |
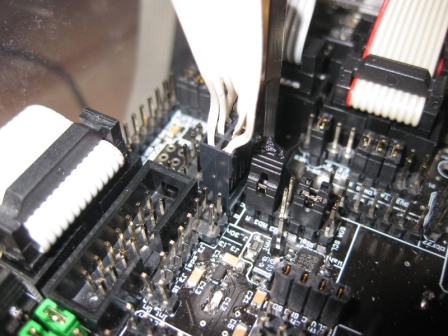
115 KB | Fabqu | So erfolgt der Anschluss des Bumperboards auf der Hauptplatine. Das rote Kabel ist VCC (=5V). | 1 |
| 11:37, 27. Mär. 2013 | Anschluss Liniensucher.jpeg (Datei) |  |
97 KB | Fabqu | Anschluss des Liniensucher-Boards auf der Hauptplatine | 1 |
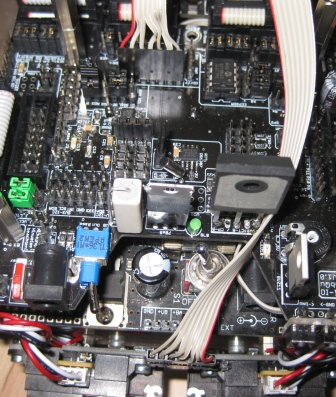
| 11:42, 27. Mär. 2013 | Stromversorgung.jpeg (Datei) |  |
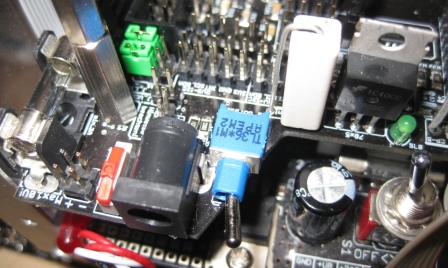
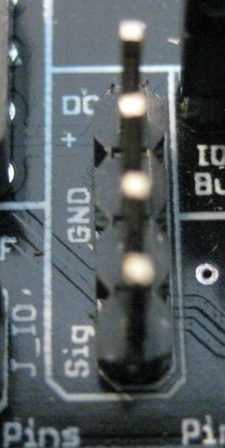
92 KB | Fabqu | Die wichtigsten Teile der Stromversorgung: Von links: Sicherung; 4 Pins zum Anschluss von Akkus; Schalter S2; Buchse B1 zum Anschluss von Akkus, Ladegeräten oder Netzgeräten; Schalter S1 zum Schalten der Stromversorgung; Hochleistungswiderstand zum Mess | 1 |
| 11:43, 27. Mär. 2013 | Temperatursensor.jpeg (Datei) |  |
29 KB | Fabqu | Der Temperatursensor TCN75A mit einem Jumper zum Schalten der 5V-Versorgung und zweien zum Einstellen der Adressbits | 1 |
| 11:44, 27. Mär. 2013 | PWM-Modulator.jpeg (Datei) |  |
87 KB | Fabqu | 16-facher PWM-Modulator für den I2C-Bus. Rechts können bis zu acht Servos angeschlossen werden. | 1 |
| 11:45, 27. Mär. 2013 | Servos M32.jpeg (Datei) |  |
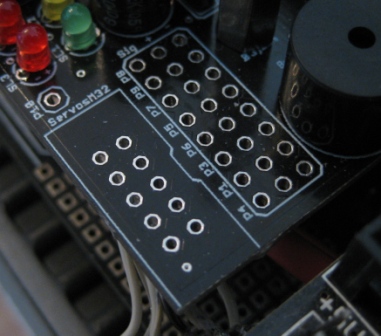
68 KB | Fabqu | Anschlussmöglichkeit für bis zu acht Servos des RP6-M32-Moduls | 1 |
| 11:47, 27. Mär. 2013 | Stromversorgung Servos.jpeg (Datei) |  |
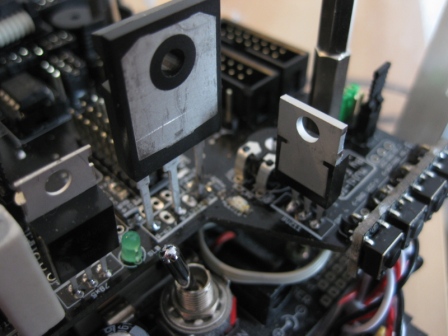
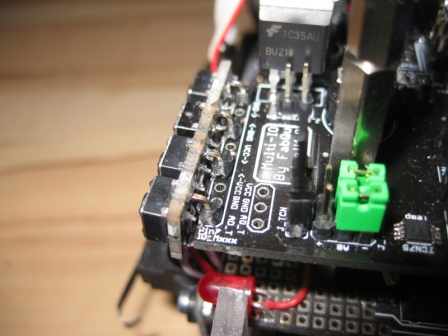
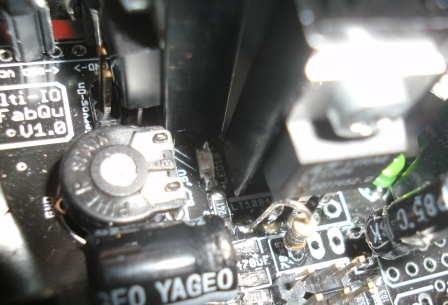
77 KB | Fabqu | Die wichtigsten Teile der Servo-Stromversorgung mit einem LT1084CP-5 (von links) : Der große IC ist der Spannungsregler, welcher durch das 500-Ohm-Poti daneben zwischen 5V und 7,7V geregelt werden kann; der BUZ11-Leistungstransistor schaltet die gesamte | 1 |
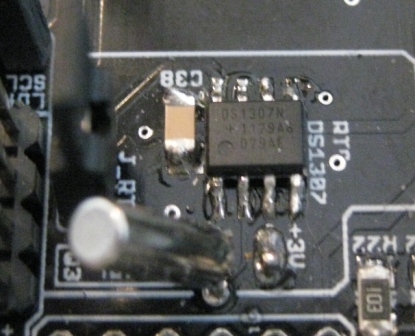
| 11:49, 27. Mär. 2013 | Uhr.jpeg (Datei) |  |
79 KB | Fabqu | Die Bauteile der Uhr DS1307 mit Quarz und Jumper (für 5V-Versorgung). Die 3V-Knopfzelle ist auf der Unterseite der Platine untergebracht | 1 |
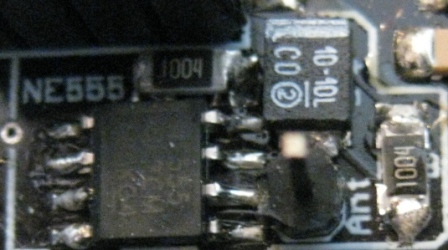
| 11:51, 27. Mär. 2013 | Berührungssensor.jpeg (Datei) |  |
68 KB | Fabqu | Der Berührungssensor mit dem Timer-IC NE555 | 1 |
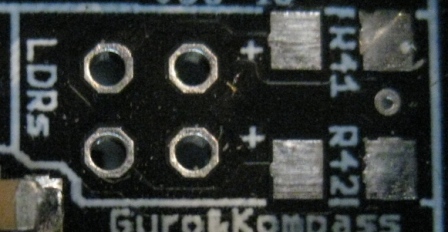
| 11:52, 27. Mär. 2013 | Spannungsteiler.jpeg (Datei) |  |
63 KB | Fabqu | Die Vorbereitung für Analoge Sensoren wie lichtsensitive Widerstände | 1 |
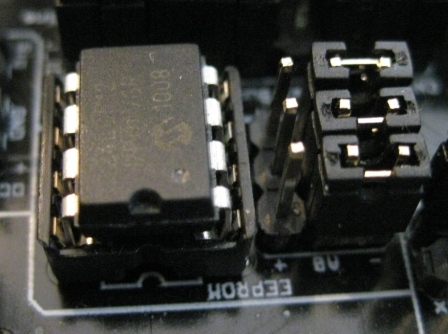
| 11:53, 27. Mär. 2013 | EEPROM.jpeg (Datei) |  |
80 KB | Fabqu | Das EEPROM des Typs 24LCxxx mit drei Jumpern zum Einstellen der Adressbits | 1 |
| 11:55, 27. Mär. 2013 | Tasterboard befestigt.jpeg (Datei) |  |
75 KB | Fabqu | Das Tasterboard, mittels vier 90grad-Stiften am Multi-IO-Modul verlötet | 1 |
| 11:56, 27. Mär. 2013 | DCF77.jpeg (Datei) |  |
61 KB | Fabqu | Der Anschluss der Funkuhr DCF77 erfolgt über vier Pins | 1 |
| 11:59, 27. Mär. 2013 | GPS.jpeg (Datei) |  |
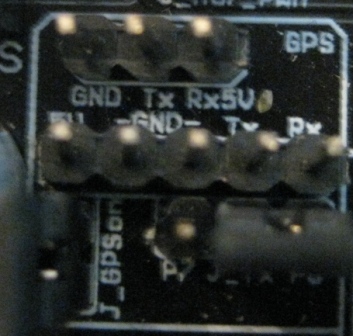
65 KB | Fabqu | Der Anschluss des GPS-Moduls erfolgt über 5 Pins. Hier erkennt man auch den Jumper zum Schalten der 5V-Versorgung sowie zum Einstellen der Tx-Leitung. An den drei Pins am oberen Rand können GND, Rx sowie Tx auch direkt mit einem RP6-UART-Stecker verbund | 1 |
| 12:01, 27. Mär. 2013 | 9D-3D-Kompass.jpeg (Datei) |  |
40 KB | Fabqu | Anschluss der Kompassmodule. Die Pins sind für den Anschluss eines 9D- oder eines 3D-Kompasses vorkonfiguriert. | 1 |
| 12:15, 27. Mär. 2013 | Wahljumper.jpeg (Datei) |  |
62 KB | Fabqu | Der Jumper-Block, welcher ADC-Leitungen verteilt, hier in der Grundposition zur Verwendung des Multi-IO-Moduls mit dem RP6-M256-Modul und des Liniensucher-Boards. | 2 |
| 12:51, 27. Mär. 2013 | Liniensucher-Board.jpeg (Datei) |  |
42 KB | Fabqu | 2 | |
| 12:34, 3. Apr. 2013 | LT1084CT.jpeg (Datei) |  |
109 KB | Fabqu | Hier die Verwendung eines LT1084CT (ohne ...-5) Das 500-Ohm-Potentiometer kann verwendet werden, wenn zwischen die Beine "Adj" und "Out" des Reglers ein 91-Ohm-Widerstand (bedrahtet oder SMD-1206-Package) gelötet wird. Dann kann die Ausgangsspannung zwis | 1 |
| 09:31, 5. Mai 2013 | LSM303DLH-1.jpg (Datei) |  |
89 KB | Robonooby | 1 | |
| 09:33, 5. Mai 2013 | LSM303DLH-2.jpg (Datei) |  |
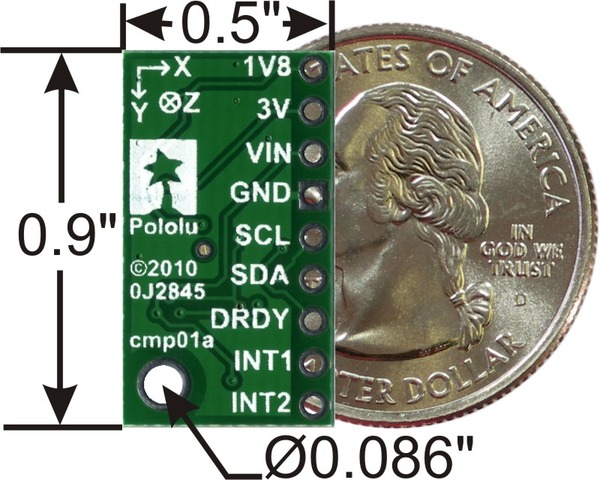
83 KB | Robonooby | LSM303DLH Sensormodul von Pololu Sicht von Oben | 1 |
| 10:18, 5. Mai 2013 | Flugzeug-Roll-Nick.jpg (Datei) |  |
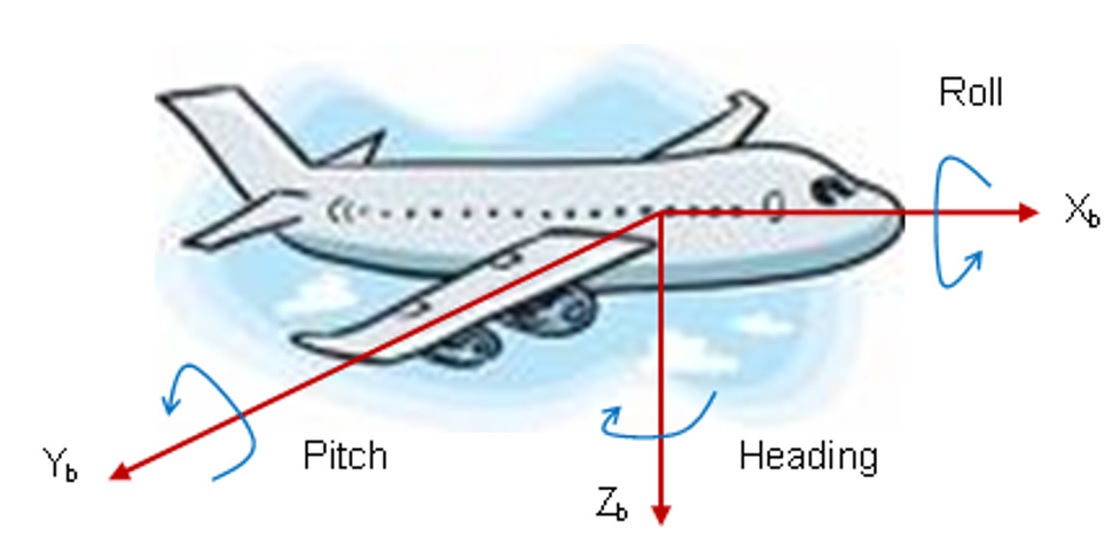
74 KB | Robonooby | Rollen und Nicken anhand eines Flugzeugbeispiels | 1 |
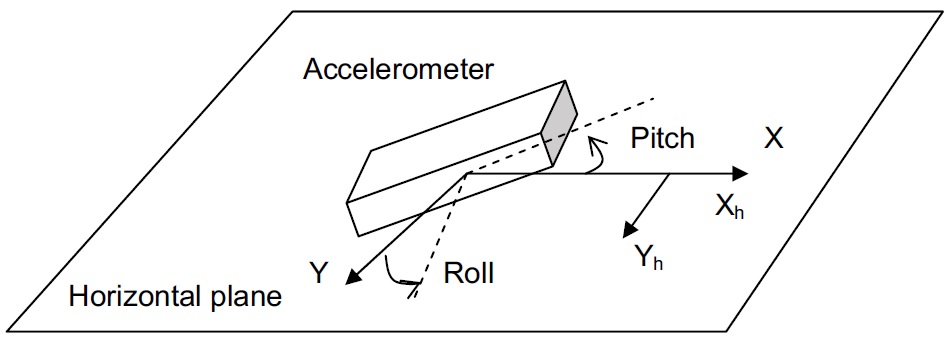
| 10:19, 5. Mai 2013 | Pitch-Roll.jpg (Datei) |  |
46 KB | Robonooby | 1 | |
| 14:20, 11. Mai 2013 | LSM303DLH-Formeln.jpg (Datei) |  |
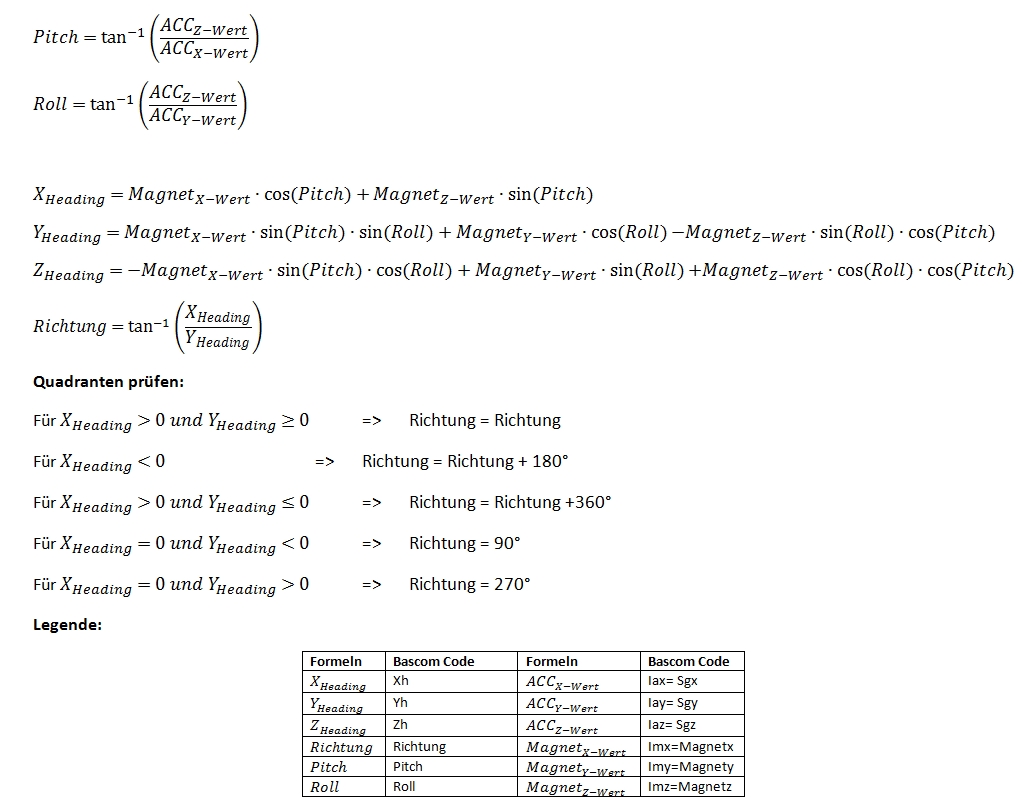
284 KB | Robonooby | Formeln zur Berechnung von Neigungskompensation sowie Pitch und Roll und Kompensation | 2 |
| 15:52, 20. Jun. 2013 | Faszinationpistenraupen.jpg.jpg (Datei) |  |
21 KB | Frank | 1 | |
| 16:10, 20. Jun. 2013 | Baumaschinenmodelle.jpg (Datei) |  |
26 KB | Frank | 1 | |
| 03:42, 24. Jun. 2013 | Botanic.jpg (Datei) |  |
170 KB | Vanessa.s_alt | Botanical | 1 |
| 03:49, 24. Jun. 2013 | Multimeter.jpg (Datei) |  |
5 KB | Vanessa.s_alt | Digitalmultimeter | 1 |
| 03:56, 24. Jun. 2013 | Digitalmultimeter.jpg (Datei) |  |
4 KB | Vanessa.s_alt | Digitalmultimeter | 2 |
| 03:59, 24. Jun. 2013 | Luefter.jpg (Datei) |  |
9 KB | Vanessa.s_alt | Ein Axiallüfter | 1 |
| 13:27, 29. Jun. 2013 | Winbot710.jpg (Datei) |  |
185 KB | Frank | 2 | |
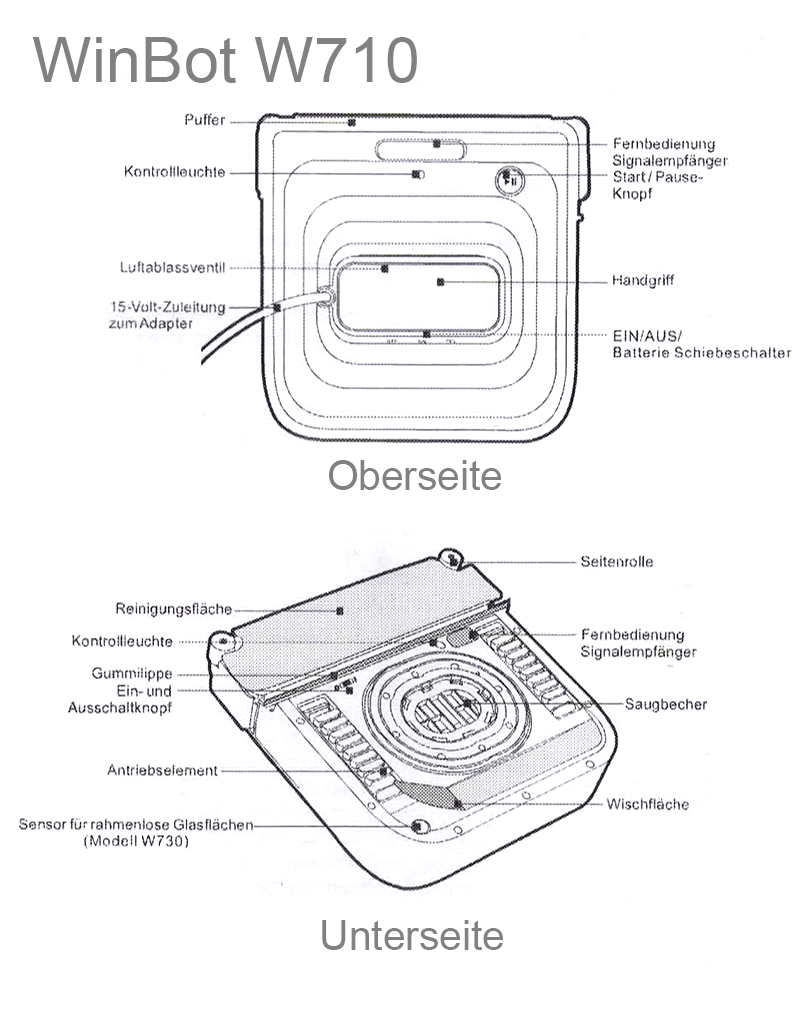
| 13:28, 29. Jun. 2013 | Winbotschema.png (Datei) |  |
418 KB | Frank | 1 | |
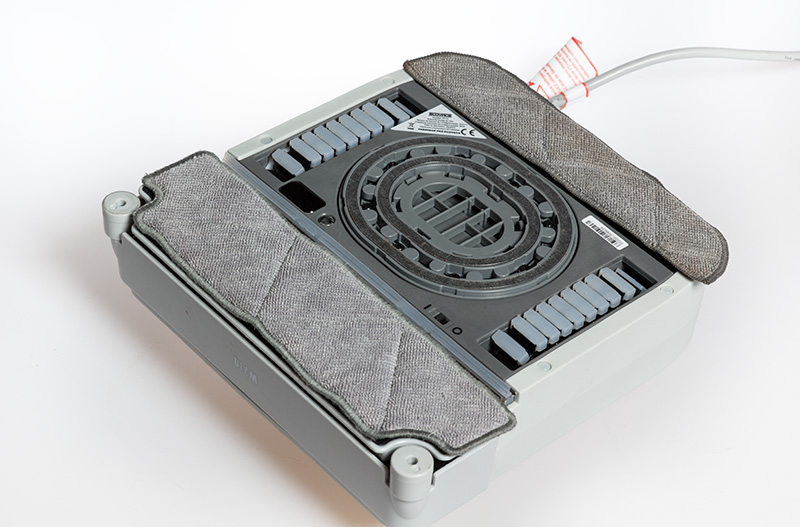
| 10:39, 30. Jun. 2013 | Winbotunterseite.jpg (Datei) |  |
149 KB | Frank | 2 | |
| 10:42, 30. Jun. 2013 | Zuebehoer.jpg (Datei) |  |
189 KB | Frank | 1 | |
| 10:43, 30. Jun. 2013 | Ketten.jpg (Datei) |  |
234 KB | Frank | 1 | |
| 10:43, 30. Jun. 2013 | Vakuum.jpg (Datei) |  |
217 KB | Frank | 1 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Erste Seite |
Vorherige Seite |
Nächste Seite |
Letzte Seite |
