
(→Autor/en) |
(→Für alle "Freaks" lässt sich Robotino noch erweitern:) |
||
| (6 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Bild:Robo AP.jpg|right]] | [[Bild:Robo AP.jpg|right]] | ||
| − | Robotino ist ein Gerät | + | Robotino ist ein Gerät der Firma Festo Didactic. Mittlerweile sind über 1000 Stück davon verkauft worden. Es gibt sogar einen eigenen [http://www.robocup.org/ Robocup] Wettbewerb, die [http://www.festo-didactic.com/int-en/news/robotino-robocup-festo-logistics-competition.htm Festo Logistics Competition] |
== Hardware == | == Hardware == | ||
| Zeile 14: | Zeile 14: | ||
== Software == | == Software == | ||
| − | Festo Didactic hat eine Software namens "Robotino View", mit der man den Robotino programmieren | + | Festo Didactic hat eine Software namens "Robotino View", mit der man den Robotino grafisch ala LabView oder Simulink programmieren kann. Das geht sehr einfach, weil die Software auf mobile Robotik (und Robotino) zugeschnitten ist. Man kommt mit Farbbildverarbeitung und reaktiven Verhaltensmustern schon erstaunlich weit. Programmierprofis wollen sich natürlich nicht in ein grafisches Programmiertool einsperren lassen. Das API zu Robotino gibt es für C/C++/Java/.Net/Matlab/LabView, so dass eigentlich für jeden was dabei ist. Die API ist netzwerktransparent, d.h. die eigenen Programme können direkt auf Robotino oder auf einem Remote-Rechner ablaufen. Dazu gibt es auch von der UNI München ein Praktikum (siehe Weblinks) |
Für den Anfänger: Per Tastatur (oben) lassen sich kleine DEMOs starten | Für den Anfänger: Per Tastatur (oben) lassen sich kleine DEMOs starten | ||
| − | Das aktuelle | + | Das aktuelle API kann man sich unter [http://wiki.openrobotino.org wiki.openrobotino.org] herunterladen. |
| − | Mittlerweile gibt es auch eine Anbindung an [http://www.ros.org/wiki/robotino_base ROS] von [http://www.willowgarage.com Willow Garage]. Damit steht ein mächtiges, offenes und kostenfreies Framework für mobile Roboter inkl. Lokalisierung, Navigation usw. | + | Mittlerweile gibt es auch eine Anbindung an [http://www.ros.org/wiki/robotino_base ROS] von [http://www.willowgarage.com Willow Garage]. Damit steht ein mächtiges, offenes und kostenfreies Framework für mobile Roboter inkl. Lokalisierung, Navigation usw. für Robotino zur Verfügung. |
== Für alle "Freaks" lässt sich Robotino noch erweitern: == | == Für alle "Freaks" lässt sich Robotino noch erweitern: == | ||
| Zeile 27: | Zeile 27: | ||
* 2 Relais für zusätzliche Aktorik | * 2 Relais für zusätzliche Aktorik | ||
* (und noch ein freier Motorcontoller ist unterm Gehäuse versteckt) | * (und noch ein freier Motorcontoller ist unterm Gehäuse versteckt) | ||
| + | * Laserscanner | ||
| + | * Gyroskop | ||
| + | * besser Akkus | ||
| Zeile 36: | Zeile 39: | ||
==Autor/en== | ==Autor/en== | ||
* --[[Benutzer:Jmb|JMB]] 19:29, 16. Okt 2006 (CEST) | * --[[Benutzer:Jmb|JMB]] 19:29, 16. Okt 2006 (CEST) | ||
| − | * | + | * [[Benutzer:cverbeek|Verbeek]] 10:05, 08. Juni 2010 (CEST) |
==Siehe auch== | ==Siehe auch== | ||
| Zeile 46: | Zeile 49: | ||
==Weblinks== | ==Weblinks== | ||
* http://www.robotino.de (Herstellerseite) | * http://www.robotino.de (Herstellerseite) | ||
| − | * http:// | + | * http://wiki.openrobotino.org (C++ Quellcodes etc) |
* http://forum.openrobotino.org (Support-Forum) | * http://forum.openrobotino.org (Support-Forum) | ||
Aktuelle Version vom 30. August 2011, 16:28 Uhr

Robotino ist ein Gerät der Firma Festo Didactic. Mittlerweile sind über 1000 Stück davon verkauft worden. Es gibt sogar einen eigenen Robocup Wettbewerb, die Festo Logistics Competition
Inhaltsverzeichnis
Hardware
- Es hat einen Omniantrieb mit 3 OmniWheels
- und unter der Haube einen PC104 - mit Realtime Linux-Kernel und 1GB (4GB oder 16GB optional) CF-Card als "Festplatte"
- Die 3 Motoren werden über eine Steuerplatine (im Bild grün) angesprochen und die Motoren geben über Sensoren Rückgabedaten zurück an den Controller
- Kommunikation per WLAN (AccessPoint von LevelOne und die neuen Robotinos von Allnet) .
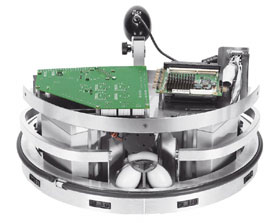
- Webcam per USB angeschlossen
- ich gehe per USB-Tastatur und VGA-Monitor direkt an den Robotino
- 9 Sensoren rundum, damit man den Abstand 360° erkennen kann und
- 1x Notabschalt-Bumper (1/0) Signal
- das Ganze ist sehr robust hergestellt (hält einiges aus ;-)

Software
Festo Didactic hat eine Software namens "Robotino View", mit der man den Robotino grafisch ala LabView oder Simulink programmieren kann. Das geht sehr einfach, weil die Software auf mobile Robotik (und Robotino) zugeschnitten ist. Man kommt mit Farbbildverarbeitung und reaktiven Verhaltensmustern schon erstaunlich weit. Programmierprofis wollen sich natürlich nicht in ein grafisches Programmiertool einsperren lassen. Das API zu Robotino gibt es für C/C++/Java/.Net/Matlab/LabView, so dass eigentlich für jeden was dabei ist. Die API ist netzwerktransparent, d.h. die eigenen Programme können direkt auf Robotino oder auf einem Remote-Rechner ablaufen. Dazu gibt es auch von der UNI München ein Praktikum (siehe Weblinks)
Für den Anfänger: Per Tastatur (oben) lassen sich kleine DEMOs starten
Das aktuelle API kann man sich unter wiki.openrobotino.org herunterladen.
Mittlerweile gibt es auch eine Anbindung an ROS von Willow Garage. Damit steht ein mächtiges, offenes und kostenfreies Framework für mobile Roboter inkl. Lokalisierung, Navigation usw. für Robotino zur Verfügung.
Für alle "Freaks" lässt sich Robotino noch erweitern:
- 10 analoge Eingänge 0 – 10 V, 50 Hz
- 8 digitale Ein- und Ausgänge (24 V, kurzschlussfest und mit Überlastschutz)
- 2 Relais für zusätzliche Aktorik
- (und noch ein freier Motorcontoller ist unterm Gehäuse versteckt)
- Laserscanner
- Gyroskop
- besser Akkus
Ggf. gibt es noch mehr Robotino-Nutzer, die hier ihre Bilder / Erfahrungen ablegen? Hier die sachlichen Infos/Fakten/Tipps und im Roboternetz-Forum die Diskussionen. Mir macht's auf jeden Fall Spaß, mit dem Gerät im Praktikum zu arbeiten (nur billig ist er nicht grad).
Autor/en
Siehe auch
Weblinks
- http://www.robotino.de (Herstellerseite)
- http://wiki.openrobotino.org (C++ Quellcodes etc)
- http://forum.openrobotino.org (Support-Forum)
