
Frank (Diskussion | Beiträge) K (→Siehe auch) |
Vish (Diskussion | Beiträge) |
||
| Zeile 1: | Zeile 1: | ||
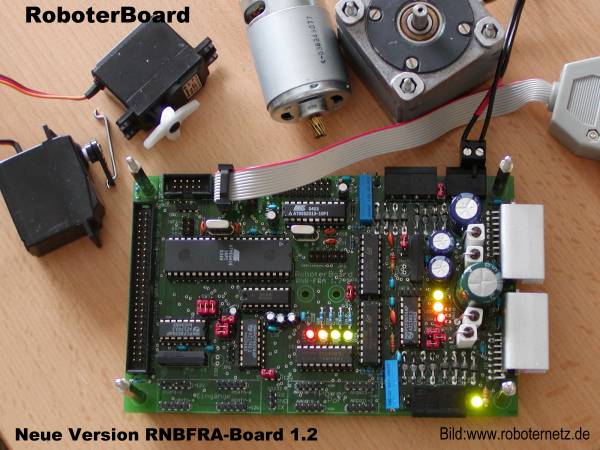
| − | Das RNBFRA-Board ist in | + | Das RNBFRA-Board ist in einer sehr langen Diskussion im Roboternetz entstanden und liegt jetzt in Version 1.2 vor. Das Board ist sehr stark gepackt und bietet zahlreiche Funktionen gleich auf einer Platine. Besondere Merkmale dieses Boards ist der [[Atmel]] [[Atmel Controller Mega16 und Mega32|Mega32]] Hauptcontroller und der Atmel AT 90S2313 CoCOntroller (also zwei Controller) sowie die Porterweiterungen, Ausgangsports für größere Lasten, Unterstützung von stärkeren Getriebe- als auch Schrittmotoren. |
Eine weitere Besonderheit ist der Energiesparmode. Per Software läßt sich der Ruhestrom im Schrittmotorbetrieb als auch Getriebemodus erheblich zu reduzieren. Auch externe Sensoren und Aktoren können dadurch per Software abgeschaltet werden. Zudem gibt es nun einen zusätzlichen Sleep-Modus, welcher Hardware-Erweiterungen (welche dieses Unterstützen) auf einen Stromsparmodus umschaltet. | Eine weitere Besonderheit ist der Energiesparmode. Per Software läßt sich der Ruhestrom im Schrittmotorbetrieb als auch Getriebemodus erheblich zu reduzieren. Auch externe Sensoren und Aktoren können dadurch per Software abgeschaltet werden. Zudem gibt es nun einen zusätzlichen Sleep-Modus, welcher Hardware-Erweiterungen (welche dieses Unterstützen) auf einen Stromsparmodus umschaltet. | ||
[[Bild:rnbfradiagramm.jpg|thumb|Beschreibung der Funktionselemente beim RNBFRA-Board]] | [[Bild:rnbfradiagramm.jpg|thumb|Beschreibung der Funktionselemente beim RNBFRA-Board]] | ||
Version vom 23. November 2005, 17:38 Uhr
Das RNBFRA-Board ist in einer sehr langen Diskussion im Roboternetz entstanden und liegt jetzt in Version 1.2 vor. Das Board ist sehr stark gepackt und bietet zahlreiche Funktionen gleich auf einer Platine. Besondere Merkmale dieses Boards ist der Atmel Mega32 Hauptcontroller und der Atmel AT 90S2313 CoCOntroller (also zwei Controller) sowie die Porterweiterungen, Ausgangsports für größere Lasten, Unterstützung von stärkeren Getriebe- als auch Schrittmotoren. Eine weitere Besonderheit ist der Energiesparmode. Per Software läßt sich der Ruhestrom im Schrittmotorbetrieb als auch Getriebemodus erheblich zu reduzieren. Auch externe Sensoren und Aktoren können dadurch per Software abgeschaltet werden. Zudem gibt es nun einen zusätzlichen Sleep-Modus, welcher Hardware-Erweiterungen (welche dieses Unterstützen) auf einen Stromsparmodus umschaltet.



So kann sich das Board nun z.B. mehrere Stunden schlafen legen und dann per Software erwachen um die Hausarbeit zu übernehmen. Was ja insbesondere bei auch geplanten Staubsaugerprojekten wichtig war. Dieses Board wird also vor allem für Bastler mit etwas mehr Elektronik Erfahrung empfohlen. Für den Einstieg kann RN-Control mit deutlich geringerer Aufbauzeit eine gute Alternative sein.
http://www.robotikhardware.de/bilder/fra12board1.jpg
Inhaltsverzeichnis
Die wichtigsten Features noch mal im Überblick
- 2 Getriebemotoren + 1 Schrittmotor direkt anschließbar (bis 2A)
- Alternativ 2 Schrittmotoren direkt anschließbar (max 2 A kurzzeitig 3A)
- Regelbare Schrittmotor Strombegrenzung (L297) (daher fast alle Schrittmotoren verwendbar)
- Voll- und Halbschritt wählbar
- Bei voller Bestückung alles über Jumper jederzeit umkonfigurierbar (z.B. von Getriebemotoren auf Schrittmotoren und umgekehrt, ohne löten)
- 10 Servos direkt anschließbar
- 8 Eingangs- oder Ausgangsports über 4 Stiftleisten verfügbar
- 8 Power-Ausgangsports (max. 500 mA) über 4 Stiftleisten verfügbar
- 8 Analog-Digitalwandler und weitere Ports über RNB-Stiftleiste verfügbar
- 5 weitere freie I/O Ports über neuen EnergiePort (ab Version 1.2)
- Energiesparfunktionen, per Software abschaltbare Endstufe, abschaltbare Sensoren und Aktoren sowie Sleep Modus für Peripherie am RNB-Bus
- Drehgeberanschluss für 2 Motoren
- Neu: Jetzt 8 LED´s - davon drei nun unabhängig vom Powerport ansteuerbar
- Wahlweise AVR Mega 16 oder Mega 32 bestückbar (on Board) oder extern C-Control etc.
- Programmierbarer AVR CoController AT90S2313 on Board (entlastet Hauptcontroller)
- Betriebsspannung 6 bis 24 V (wahlweise getrennte Motorspannung)
- 5V und wahlweise 12 Stabilisierung!
- RNB-Bus (RoboterNetz-Bus zum Anschluß beliebiger Erweiterungen / Controller)
- Kompakter I2C-Bus(mit INT Leitung) zum Anschluß zahlreicher vorhandener Karten
- PC kompatible RS232 (MAX232 on Board) und wahlweise über Haupt- oder CoProzessor oder beide nutzbar
- Haupt- und Co-Controller über zahlreichen Programmiersprachen programmierbar. Wer nicht in Assembler programmieren möchte für den stehen im Internet kostenlose Open Source Entwicklungstools wie GCC (C-Compiler) oder nutzbare Demos wie Bascom(Basic Compiler) zur Verfügung.
- 6 genormte Bohrlöcher zur Befestigung und "Huckepack Montierung" weiterer Platinen
- Ausführliche Dokumentation mit Bascom Beispielen sowie Compiler und Tools im Lieferumfang
Projektbeispiele
Einige Projektbeispiele von Anwendern des Boards
http://www.roboternetz.de/wiki/uploads/Main/chefkochbot.jpg
http://www.roboternetz.de/wiki/uploads/Main/marsrover.gif
http://www.robotikhardware.de/bilder/rnbeispiele/rnbfraref1.jpg
Stückliste
Anzahl Bezeichnung auf Platine Wert / Beschreibung (genauer stehts in der PDF Anleitung) 4 R1,R2,R6,R7 Hochlastwiderstand 0,5 Ohm 4-5 Watt (Raster 27mm) 1 C14 Elko 1000uF/35V (R=5mm, D=14mm) RAD 1000/35 16 C2,C3,C5,C6,C9,C12,C19,C20,C22,C23,C25,C26,C28,C29,C33,C35 Kondensator 100n 5 C11,R12,R13, R35,R36 Widerstand 10K (R=7,5mm L=6mm,B=2,5mm) 1/4W 2 R4,R9 Spindeltrimmer (L=14mm,B=4,5mm) 10k 2 C13,C31 Elko 10uF/63V (R=2,5mm, D=4mm) 2 C27,C21 Elko 220 uF/35V (R=5mm, D=10mm) 1 C30 Elko 2200 uF/35V (R=7,5mm, D=16mm) 3 R3,R8,R34 Widerstand 22k (R=7,5mm L=6mm,B=2,5mm) 1/4W 4 C7,C8,C10,C11 Kondensator 22pf (R=5mm L=6mm,B=3mm) 1 R32 Widerstand 330 Ohm (R=7,5mm L=6mm,B=2,5mm) 1/4W 2 C1,C4 Kondensator 3,3n (R=5mm L=6mm,B=3mm) 4 C15,C16,C17,C18 Elko 1 uF oder 4,7uF (R=2,5mm, D=4mm) 9 APort1-2, APort2-4, APort5-6, APort7-8, Port1-2, Port2-4, Port5-6, Port7-8,JP12 5 pol Stiftleiste 1x5 gerade 1 R33 Widerstand 5,1k (R=7,5mm L=6mm,B=2,5mm) 1/4W 2 R5,R10 Widerstand 6,2k (R=7,5mm L=6mm,B=2,5mm) 1/4W 4 R28,R29,R30,R31 Widerstand 680 Ohm (R=7,5mm L=6mm,B=2,5mm) 1 IC11 Spannungsregler 78S05 (2A) oder LM2940 CT5 (1A) 1 IC7 Spannungsregler 78S12 (2A) oder LM2940 CT12 (1A) 1 MEGA Controller ATMEGA 32 DIP 1 IC5 Controller Atmel AT 90S2313 DIP 16 D1,D2,D3,D4,D5,D6,D7,D8,D9,D10,D11,D12,D13,D14,D15,D16 Diode BYV27/200 4 JP2,JP6,UREFR,UREFL Jumper Stiftleiste 1x2 8 JP7,JP8,JP9,JP5,RS232,ADR1,ADR2,ADR3 Jumper Stiftleiste 1x3 4 JP16,ADR1,ADR2,ADR3 Jumper Stiftleiste 2x3 1 JP3 Jumper Stiftleiste 2x6 2 IC2,IC4 IC L297 2 IC1,IC3 IC L298 4 LED1,LED3,LED5,LED8 Leuchtdiode 3mm grün 2 LED2,LED7 Leuchtdiode 3mm gelb 2 LED4,LED6 Leuchtdiode 3mm rot 1 IC9 IC MAX232 CPE 3 PCF1,PCF2,PCF3 PCF8574 AP IC PCF8574AP 1 Q1 Quarz 4 Mhz 1 Q2 Quarz 8 Mhz 1 Power Schraubklemmen 3polig (R=5,12) 2 MOTOR(EN)LINKS, Stepperrechts Schraubklemmen 4er (R=5,12) 1 SERVOS Stiftleiste 1x10 1 Drehgeber Stiftleiste 1x4 gerade 1 JP19 Stiftleiste 2 x 10 gerade 1 JP1 Wannenstiftleiste 2x25 oder Stiftleiste 2x25 gerade 2 ISP1,ISP2 Stiftleiste 2x5 gerade 1 I2C-Bus Wannenbuchse 2x5 gerade 1 IC10 IC ULN2803A 19 Kurzschlussstecker JUMPER 1 Kühlkörper Kühlkörper 3 20 pol Fassung für IC2,IC4,IC5 4 16 pol Fassung für IC9,PCF1,PCF2,PCF3 1 18 pol Fassung für IC10 1 40 pol Fassung für U$1 1 RN1 Widerstandsnetzwerk ca. 600 Ohm z.B. Reichelt SIL 5-4 330 2 Reed Relais SIL 5V SIL Relais 4 Abstandsbolzen min. 35mm Um später Huckepack Erweiterungen zu montieren 4 Abstandsbolzen min. 10 mm Zum montieren des Boards
Siehe auch
- Bascom
- Bascom - Erstes Programm in den AVR Controller übertragen
- RN-Definitionen
- RN-Board FAQ-Seite
- RN-Control
- Atmel
Weblinks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
