|
|
| Zeile 20: |
Zeile 20: |
| | | | |
| | ===Elektronik=== | | ===Elektronik=== |
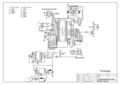
| − | [[Bild:IMGP0416small.JPG|right|thumb|Platinen]]
| |
| − |
| |
| | Motorregler mit Atmega 168A sowie eine Hauptsteuerung mit einem Atmega 644PA. Ein Display von Display3000 als Tacho (und Datenlogger). Siehe Stückliste. | | Motorregler mit Atmega 168A sowie eine Hauptsteuerung mit einem Atmega 644PA. Ein Display von Display3000 als Tacho (und Datenlogger). Siehe Stückliste. |
| | | | |
| Zeile 36: |
Zeile 34: |
| | | | |
| | ==Programme== | | ==Programme== |
| − | '''Motorcontroller.bas (BASCOM)'''
| + | ''Motorcontroller.bas (BASCOM)'' [http://www.listrik.de/html/freeware.html] |
| − | <pre>
| + | |
| − | '******************Listrik01 Motorsteuerung, Version 01 **********************
| + | |
| − | | + | |
| − | 'Es gibt keine Stromregelung, sondern eine Lageregelung im Hauptcontroller
| + | |
| − | | + | |
| − | 'LED1 blinkt mit gültigem seriellen Telegramm
| + | |
| − | | + | |
| − | 'LED2 blinkt wenn Zwangskommutierung
| + | |
| − | 'LED2 dauerlicht wenn serielle Verbindung fehlt, d.h. Not Halt
| + | |
| − | | + | |
| − | 'LED1 und LED2 blinken abwechselnd mit 1Hz für 3 Sekunden während CPU Anlauf
| + | |
| − | | + | |
| − | 'LED1 und LED2 blinken mit 2Hz wenn Hallstecker nicht gesteckt ist.
| + | |
| − | ' Ausserdem antwortet der Controller jetzt nicht auf Telegramme.
| + | |
| − | | + | |
| − | 'LockBit, FuseBit , FuseBitHigh , FuseBitExtended
| + | |
| − | '$prog &HFF , &HF9 , &HDF , &HF6 'Fusebits 168A CPU
| + | |
| − | | + | |
| − | 'Use AMTEL Studio / Fuses Menu instead to set fusebits
| + | |
| − | 'BOOTSZ = 1024W_1C00
| + | |
| − | 'BOOTRST = unchecked
| + | |
| − | 'RSTDISBL = unchecked
| + | |
| − | 'DWEN = unchecked
| + | |
| − | 'SPIEN = checked
| + | |
| − | 'WDTON = unchecked
| + | |
| − | 'EESAVE = unchecked
| + | |
| − | 'BODLEVEL = unchecked
| + | |
| − | 'CKDIV8 = unchecked
| + | |
| − | 'CKOUT = unchecked
| + | |
| − | 'SUT_CKSEL = EXTFSXTAL_1KCK_14CK_4MS1
| + | |
| − | | + | |
| − | $regfile = "m168def.dat" 'ATMEGA168A CPU
| + | |
| − | $crystal = 11059200
| + | |
| − | $baud = 57600
| + | |
| − | $hwstack = 32
| + | |
| − | $swstack = 20
| + | |
| − | $framesize = 40
| + | |
| − | | + | |
| − | Const _pcicr = &B00000101 'Bit0 = PCIE0 = Port B0..B7
| + | |
| − | 'Bit2 = PCIE2 = Port D0..D7
| + | |
| − | | + | |
| − | Const Numhall = 3 '<<<<<<<<<< TEST, Normalerweise = 4
| + | |
| − | Const Pclink = 1 '<<<<<<<<<< TEST, Normalerweise = 0, Sie Delphi
| + | |
| − | | + | |
| − | Declare Sub Setspeed
| + | |
| − | Declare Sub Pwm_start
| + | |
| − | Declare Sub Pwm_stop
| + | |
| − | | + | |
| − | Config Portb.0 = Input 'Hall_D
| + | |
| − | Config Portb.1 = Output 'B-
| + | |
| − | Config Portb.2 = Output 'B+
| + | |
| − | Config Portb.3 = Output 'A-(MOSI)
| + | |
| − | Config Portb.4 = Output 'LED2 (MISO)
| + | |
| − | Config Portb.5 = Input 'SCK
| + | |
| − | ' PortB.6 XTAL
| + | |
| − | ' PortB.7 XTAL
| + | |
| − | | + | |
| − | Config Portc.0 = Input 'UBatterie
| + | |
| − | Config Portc.1 = Input 'I-Ist
| + | |
| − | Config Portc.2 = Input 'Kühlkörper Temperatur
| + | |
| − | Config Portc.3 = Output 'LED1
| + | |
| − | Config Portc.4 = Output 'Lüfter
| + | |
| − | Config Portc.5 = Input 'Adress Jumper
| + | |
| − | ' PortC.6 Reset
| + | |
| − | ' PortC.7 nicht rausgeführt
| + | |
| − | | + | |
| − | ' PortD.0 RxD
| + | |
| − | ' PortD.1 TxD
| + | |
| − | Config Portd.2 = Input 'Hall_C
| + | |
| − | Config Portd.3 = Output 'A+
| + | |
| − | Config Portd.4 = Input 'Hall_B
| + | |
| − | Config Portd.5 = Output 'C+
| + | |
| − | Config Portd.6 = Output 'C-
| + | |
| − | Config Portd.7 = Input 'Hall_A
| + | |
| − | | + | |
| − | Hall_a Alias Pind.7
| + | |
| − | Hall_b Alias Pind.4
| + | |
| − | Hall_c Alias Pind.2
| + | |
| − | Hall_d Alias Pinb.0
| + | |
| − | Led1 Alias Portc.3
| + | |
| − | Led2 Alias Portb.4
| + | |
| − | Fan Alias Portc.4
| + | |
| − | Adrjumper Alias Pinc.5
| + | |
| − | | + | |
| − | 'A-Werte stellen die Rotorposition in Abhängigkeit der Halleingänge dar
| + | |
| − | 'Siehe Exceltabelle "Rotorposition Array A().xls"
| + | |
| − | Dim A(15) As Byte At $100
| + | |
| − | | + | |
| − | 'S-Werte stellen die aktuelle Soll PWM-Breite dar
| + | |
| − | Dim S(12) As Byte At $10f
| + | |
| − | | + | |
| − | '1 = Links, 2 = Leerlauf, 3 = Not Aus
| + | |
| − | Dim Richtung(255) As Byte At $11b
| + | |
| − | | + | |
| − | 'IstRichtung-Werte stellen den 0..2, siehe Zeile oberhalb
| + | |
| − | Dim Istrichtung As Integer At $21a
| + | |
| − | | + | |
| − | 'Ticks-Werte stellen die Anzahl verbrauchter Ticks während eine Do..Loop dar
| + | |
| − | Dim Ticks As Integer At $221
| + | |
| − | | + | |
| − | 'Anzahl Kommutierungen zwischen seriellen Telegrammen
| + | |
| − | Dim Uzu As Integer 'Netzspannung
| + | |
| − | Dim M1 As Byte At Uzu + 0 Overlay
| + | |
| − | Dim M2 As Byte At Uzu + 1 Overlay
| + | |
| − | | + | |
| − | Dim Izu As Integer 'Motorstrom
| + | |
| − | Dim M3 As Byte At Izu + 0 Overlay
| + | |
| − | Dim M4 As Byte At Izu + 1 Overlay
| + | |
| − | | + | |
| − | Dim Ausgabeticks As Integer 'Anzahl Ticks für ein Do ... Loop
| + | |
| − | Dim M5 As Byte At Ausgabeticks + 0 Overlay
| + | |
| − | Dim M6 As Byte At Ausgabeticks + 1 Overlay
| + | |
| − | | + | |
| − | Dim Temperatur As Integer 'Kühlkörpertemperatur
| + | |
| − | Dim M7 As Byte At Temperatur + 0 Overlay
| + | |
| − | Dim M8 As Byte At Temperatur + 1 Overlay
| + | |
| − | | + | |
| − | Dim Drehzahl As Integer 'Drehzahl
| + | |
| − | Dim M9 As Byte At Drehzahl + 0 Overlay
| + | |
| − | Dim M10 As Byte At Drehzahl + 1 Overlay
| + | |
| − | | + | |
| − | Dim Kalibrierwert As Integer
| + | |
| − | Dim Kal(2) As Byte At Kalibrierwert + 0 Overlay
| + | |
| − | | + | |
| − | Dim Sinus(12) As Byte
| + | |
| − | Dim Motorposition As Byte
| + | |
| − | Dim Altrichtung As Integer
| + | |
| − | Dim Aposition As Byte
| + | |
| − | Dim Zposition As Byte
| + | |
| − | Dim Zwangskommutieren As Byte
| + | |
| − | Dim Temp As Word
| + | |
| − | Dim Motoradresse As Byte
| + | |
| − | Dim Vwinkel As Byte
| + | |
| − | Dim Rwinkel As Byte
| + | |
| − | Dim N As Byte
| + | |
| − | Dim Notaus As Byte
| + | |
| − | Dim Loopcount As Word
| + | |
| − | Dim Sollrichtung As Byte
| + | |
| − | Dim Altsollrichtung As Byte
| + | |
| − | Dim Sollspeed As Byte
| + | |
| − | Dim Altsollspeed As Byte
| + | |
| − | Dim Bdummy As Byte
| + | |
| − | Dim Intbdummy As Byte
| + | |
| − | Dim Intidummy As Integer
| + | |
| − | Dim Sdummy As Single
| + | |
| − | Dim Idummy1 As Integer
| + | |
| − | Dim Idummy2 As Integer
| + | |
| − | Dim Uw As Word
| + | |
| − | Dim Iw As Word
| + | |
| − | Dim Uwsum As Long
| + | |
| − | Dim Iwsum As Long
| + | |
| − | Dim Wcount As Long
| + | |
| − | Dim Fancount As Long
| + | |
| − | Dim Uoffset As Single
| + | |
| − | Dim Ufaktor As Single
| + | |
| − | Dim Ioffset As Single
| + | |
| − | Dim Ifaktor As Single
| + | |
| − | Dim Empfpuffer(6) As Byte 'Empfangspuffer
| + | |
| − | Dim Ta As Byte
| + | |
| − | Dim Tb As Byte
| + | |
| − | Dim Tc As Byte
| + | |
| − | Dim Fehler As Byte
| + | |
| − | | + | |
| − | Dim Errorword As Word
| + | |
| − | Dim Errorword1 As Byte At Errorword + 0 Overlay
| + | |
| − | Dim Errorword2 As Byte At Errorword + 1 Overlay
| + | |
| − | | + | |
| − | 'Integer bzw. Word (2Byte) = %
| + | |
| − | 'Single (4Byte) = !
| + | |
| − | 'Double (8Byte) = #
| + | |
| − | 'Long (4Byte) = & ==> 32Bit Integer
| + | |
| − | 'Byte (1Byte) = ohne Zusatz
| + | |
| − | | + | |
| − | $eeprom 'wird nicht benutzt
| + | |
| − | U_offset:
| + | |
| − | Data 0.0! 'Single
| + | |
| − | U_faktor:
| + | |
| − | Data 1.0! 'Single
| + | |
| − | I_offset:
| + | |
| − | Data 0.0! 'Single
| + | |
| − | I_faktor:
| + | |
| − | Data 1.0! 'Single
| + | |
| − | V_winkel:
| + | |
| − | Data 0 'Byte
| + | |
| − | R_winkel:
| + | |
| − | Data 0 'Byte
| + | |
| − | Sinus_12: 'Sinus mit 4 Hallgebern
| + | |
| − | Data 0 , 0 , 33 , 66 , 100 , 100 , 100 , 100 , 66 , 33 , 0 , 0
| + | |
| − | Sinus_6: 'Sinus mit 3 Hallgebern
| + | |
| − | Data 0 , 33 , 66 , 100 , 66 , 33
| + | |
| − | $data
| + | |
| − | | + | |
| − | Sollspeed = 0
| + | |
| − | Pwm_stop 'Erstmal alles auschalten
| + | |
| − | | + | |
| − | For N = 1 To 15
| + | |
| − | A(n) = 0
| + | |
| − | Next
| + | |
| − | | + | |
| − | 'Variablen für die Richtungserkennung vorbelegen
| + | |
| − | 'Diese Variante frisst zwar viel Arbeitsspeicher, ist aber sehr schnell
| + | |
| − | For N = 1 To 255
| + | |
| − | Richtung(n) = 2
| + | |
| − | Next
| + | |
| − | | + | |
| − | If Adrjumper = 0 Then 'Rechter Motor
| + | |
| − | Motoradresse = 82
| + | |
| − | #if Numhall = 3 'Anzahl Hallsensoren
| + | |
| − | A(5) = 1
| + | |
| − | A(1) = 2
| + | |
| − | A(3) = 3
| + | |
| − | A(2) = 4
| + | |
| − | A(6) = 5
| + | |
| − | A(4) = 6
| + | |
| − | | + | |
| − | Richtung(21) = 3
| + | |
| − | Richtung(49) = 3
| + | |
| − | Richtung(35) = 3
| + | |
| − | Richtung(98) = 3
| + | |
| − | Richtung(70) = 3
| + | |
| − | Richtung(84) = 3
| + | |
| − | | + | |
| − | Richtung(69) = 1
| + | |
| − | Richtung(81) = 1
| + | |
| − | Richtung(19) = 1
| + | |
| − | Richtung(50) = 1
| + | |
| − | Richtung(38) = 1
| + | |
| − | Richtung(100) = 1
| + | |
| − | | + | |
| − | #else
| + | |
| − | A(12) = 12
| + | |
| − | A(4) = 11
| + | |
| − | A(6) = 10
| + | |
| − | A(14) = 9
| + | |
| − | A(10) = 8
| + | |
| − | A(2) = 7
| + | |
| − | A(3) = 6
| + | |
| − | A(11) = 5
| + | |
| − | A(9) = 4
| + | |
| − | A(1) = 3
| + | |
| − | A(5) = 2
| + | |
| − | A(13) = 1
| + | |
| − | | + | |
| − | Richtung(21) = 3
| + | |
| − | Richtung(93) = 3
| + | |
| − | Richtung(220) = 3
| + | |
| − | Richtung(196) = 3
| + | |
| − | Richtung(70) = 3
| + | |
| − | Richtung(110) = 3
| + | |
| − | Richtung(234) = 3
| + | |
| − | Richtung(162) = 3
| + | |
| − | Richtung(35) = 3
| + | |
| − | Richtung(59) = 3
| + | |
| − | Richtung(185) = 3
| + | |
| − | Richtung(145) = 3
| + | |
| − | | + | |
| − | Richtung(81) = 1
| + | |
| − | Richtung(25) = 1
| + | |
| − | Richtung(155) = 1
| + | |
| − | Richtung(179) = 1
| + | |
| − | Richtung(50) = 1
| + | |
| − | Richtung(42) = 1
| + | |
| − | Richtung(174) = 1
| + | |
| − | Richtung(230) = 1
| + | |
| − | Richtung(100) = 1
| + | |
| − | Richtung(76) = 1
| + | |
| − | Richtung(205) = 1
| + | |
| − | Richtung(213) = 1
| + | |
| − | #endif
| + | |
| − | Else
| + | |
| − | Motoradresse = 76 'Linker Motor
| + | |
| − | #if Numhall = 3 'Anzahl Hallsensoren
| + | |
| − | A(3) = 1
| + | |
| − | A(1) = 2
| + | |
| − | A(5) = 3
| + | |
| − | A(4) = 4
| + | |
| − | A(6) = 5
| + | |
| − | A(2) = 6
| + | |
| − | | + | |
| − | Richtung(35) = 3
| + | |
| − | Richtung(49) = 3
| + | |
| − | Richtung(21) = 3
| + | |
| − | Richtung(84) = 3
| + | |
| − | Richtung(70) = 3
| + | |
| − | Richtung(98) = 3
| + | |
| − | | + | |
| − | Richtung(19) = 1
| + | |
| − | Richtung(81) = 1
| + | |
| − | Richtung(69) = 1
| + | |
| − | Richtung(100) = 1
| + | |
| − | Richtung(38) = 1
| + | |
| − | Richtung(50) = 1
| + | |
| − | #else
| + | |
| − | A(11) = 1
| + | |
| − | A(3) = 2
| + | |
| − | A(1) = 3
| + | |
| − | A(9) = 4
| + | |
| − | A(13) = 5
| + | |
| − | A(5) = 6
| + | |
| − | A(4) = 7
| + | |
| − | A(12) = 8
| + | |
| − | A(14) = 9
| + | |
| − | A(6) = 10
| + | |
| − | A(2) = 11
| + | |
| − | A(10) = 12
| + | |
| − | | + | |
| − | Richtung(236) = 3
| + | |
| − | Richtung(196) = 3
| + | |
| − | Richtung(69) = 3
| + | |
| − | Richtung(93) = 3
| + | |
| − | Richtung(217) = 3
| + | |
| − | Richtung(145) = 3
| + | |
| − | Richtung(19) = 3
| + | |
| − | Richtung(59) = 3
| + | |
| − | Richtung(186) = 3
| + | |
| − | Richtung(162) = 3
| + | |
| − | Richtung(38) = 3
| + | |
| − | Richtung(110) = 3
| + | |
| − | | + | |
| − | Richtung(42) = 1
| + | |
| − | Richtung(171) = 1
| + | |
| − | Richtung(179) = 1
| + | |
| − | Richtung(49) = 1
| + | |
| − | Richtung(25) = 1
| + | |
| − | Richtung(157) = 1
| + | |
| − | Richtung(213) = 1
| + | |
| − | Richtung(84) = 1
| + | |
| − | Richtung(76) = 1
| + | |
| − | Richtung(206) = 1
| + | |
| − | Richtung(230) = 1
| + | |
| − | Richtung(98) = 1
| + | |
| − | #endif
| + | |
| − | end if
| + | |
| − | | + | |
| − | 'AD-Wandler einstellen
| + | |
| − | Config Adc = Single , Prescaler = Auto , Reference = Off
| + | |
| − | Start Adc
| + | |
| − | | + | |
| − | '<Test Hallsensoren>
| + | |
| − | Fehler = 1
| + | |
| − | Fan = 1
| + | |
| − | While Fehler = 1
| + | |
| − | Fehler = 0
| + | |
| − | Motorposition = 0
| + | |
| − | Motorposition.0 = Hall_a
| + | |
| − | Motorposition.1 = Hall_b
| + | |
| − | Motorposition.2 = Hall_c
| + | |
| − | #if Numhall = 3 'Anzahl Hallsensoren
| + | |
| − | Motorposition.3 = 0
| + | |
| − | #else
| + | |
| − | Motorposition.3 = Hall_d
| + | |
| − | #endif
| + | |
| − | If Motorposition = 0 Then Fehler = 1 'Stecker nicht gesteckt
| + | |
| − | If Motorposition > 0 Then
| + | |
| − | 'Das währe eine Motorposition die es nicht gibt
| + | |
| − | If A(motorposition) = 0 Then Fehler = 1
| + | |
| − | End If
| + | |
| − | If Fehler = 1 Then
| + | |
| − | Toggle Led1
| + | |
| − | Toggle Led2
| + | |
| − | Waitms 250 '==> 2Hz
| + | |
| − | End If
| + | |
| − | Wend
| + | |
| − | '</Test Hallsensoren>
| + | |
| − | | + | |
| − | On Timer2 Update_pwm Nosave
| + | |
| − | | + | |
| − | 'Pin-Change Interrupt einstellen: (Hall Impulse)
| + | |
| − | Pcmsk2 = &B10010100 'Hall A, B, C
| + | |
| − | Pcmsk1 = &B00000000
| + | |
| − | Pcmsk0 = &B00000001 'Hall D
| + | |
| − | Pcicr = _pcicr
| + | |
| − | | + | |
| − | 'Wenn sich das Hallsignal ändert, wird kommutiert
| + | |
| − | On Pcint2 Kommutieren Nosave
| + | |
| − | On Pcint0 Kommutieren Nosave
| + | |
| − | | + | |
| − | 'EEPROM mit dem Programm Motorcontroller_EEPROM.bas vorbesetzen
| + | |
| − | ' Datenreihenfolge dort ist ab Byte(1):
| + | |
| − | ' U_offset, U_faktor, I_offset, I_faktor im Single Format
| + | |
| − | ' Voreilwinkel, Nacheilwinkel im Byte Format
| + | |
| − | 'Sinuskurve 12 Werte im Byte Format für 4 Hall Sensoren
| + | |
| − | 'Sinuskurve 6 Werte im Byte Format für 3 Hall Sensoren
| + | |
| − | | + | |
| − | 'Readeeprom Uoffset , 1
| + | |
| − | Uoffset = 0
| + | |
| − | | + | |
| − | 'Readeeprom Ufaktor , 5
| + | |
| − | Ufaktor = 5.37109375 'Siehe Hardwarezeichnung für Berechnung
| + | |
| − | | + | |
| − | 'Readeeprom Ioffset , 9
| + | |
| − | Ioffset = 512 '2,5V
| + | |
| − | | + | |
| − | 'Readeeprom Ifaktor , 13
| + | |
| − | Ifaktor = 7.8125 'Siehe Hardwarezeichnung für Berechnung
| + | |
| − | | + | |
| − | 'Voreilwinkel:
| + | |
| − | 'Readeeprom Vwinkel , 17
| + | |
| − | Vwinkel = 0
| + | |
| − | | + | |
| − | 'Readeeprom Rwinkel , 18
| + | |
| − | Rwinkel = 0
| + | |
| − | | + | |
| − | If Ufaktor = 0 Then Ufaktor = 1.0
| + | |
| − | If Ifaktor = 0 Then Ifaktor = 1.0
| + | |
| − | | + | |
| − | 'Angepasste Sinuskurve aus dem EEprom laden
| + | |
| − | #if Numhall = 3 'Anzahl Hallsensoren
| + | |
| − | ' For N = 1 To 6
| + | |
| − | ' Bdummy = N + 30
| + | |
| − | ' Readeeprom Sinus(n) , Bdummy
| + | |
| − | ' Next
| + | |
| − | Sinus(1) = 0
| + | |
| − | Sinus(2) = 33
| + | |
| − | Sinus(3) = 66
| + | |
| − | Sinus(4) = 100
| + | |
| − | Sinus(5) = 66
| + | |
| − | Sinus(6) = 33
| + | |
| − | #else 'Anzahl Hallsensoren = 4
| + | |
| − | ' For N = 1 To 12
| + | |
| − | ' Bdummy = N + 18
| + | |
| − | ' Readeeprom Sinus(n) , Bdummy
| + | |
| − | ' Next
| + | |
| − | Sinus(1) = 0
| + | |
| − | Sinus(2) = 0
| + | |
| − | Sinus(3) = 33
| + | |
| − | Sinus(4) = 66
| + | |
| − | Sinus(5) = 100
| + | |
| − | Sinus(6) = 100
| + | |
| − | Sinus(7) = 100
| + | |
| − | Sinus(8) = 100
| + | |
| − | Sinus(9) = 66
| + | |
| − | Sinus(10) = 33
| + | |
| − | Sinus(11) = 0
| + | |
| − | Sinus(12) = 0
| + | |
| − | #endif
| + | |
| − | | + | |
| − | Fan = 1 'Lüfter kurz einschalten damit die Lager nicht fest werden
| + | |
| − | For N = 1 To 3 '3 sekunden
| + | |
| − | Led1 = 1
| + | |
| − | Led2 = 0
| + | |
| − | Waitms 500
| + | |
| − | Toggle Led1
| + | |
| − | Toggle Led2
| + | |
| − | Waitms 500
| + | |
| − | Next
| + | |
| − | Led2 = 0
| + | |
| − | Fan = 0
| + | |
| − | | + | |
| − | On Urxc Datenempfang Nosave
| + | |
| − | Enable Urxc 'serielles UART. No parity, 1 stop bit, 8 data bits
| + | |
| − | Enable Interrupts
| + | |
| − | | + | |
| − | Do
| + | |
| − | Led1 = 0
| + | |
| − | '<Messen>
| + | |
| − | Uw = Getadc(0) + 14 'Versorgungsspannung. Siehe Hardwarezeichnung
| + | |
| − | Uwsum = Uwsum + Uw
| + | |
| − | Iw = Getadc(1) 'Gesamtstrom
| + | |
| − | Iwsum = Iwsum + Iw
| + | |
| − | Incr Wcount
| + | |
| − | 'Kühkörpertemperatur in counts. Siehe Datenblätter\10K_NTC_Kennlinie.odt
| + | |
| − | Temp = Getadc(2)
| + | |
| − | '</Messen>
| + | |
| − | '<Serielle Telegramme abarbeiten>
| + | |
| − | ' Empfpuffer(1) Empfpuffer(2) Empfpuffer(3) Empfpuffer(4) Empfpuffer(5) Empfpuffer(6)
| + | |
| − | ' <CR> Contr.Adresse Richtung PWM Checksum <CR>
| + | |
| − | If Empfpuffer(1) = 13 Then 'Das letzte im Ring verschobene empfangene CR
| + | |
| − | If Empfpuffer(6) = 13 Then
| + | |
| − | Led1 = 1
| + | |
| − | If Empfpuffer(2) = Motoradresse Then '"R" oder "L"
| + | |
| − | Disable Urxc
| + | |
| − | 'BCC für Empfangsmessage berechnen
| + | |
| − | !lds R24,{Empfpuffer(2)} 'Adresse. Load Direct from data space @address xxx
| + | |
| − | !LDs R25,{Empfpuffer(3)} 'Richtung.Load Direct from data space @address xxx
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Empfpuffer(4)} 'PWM. Load Direct from data space @address xxx
| + | |
| − | !add R24,R25
| + | |
| − | !STS {Bdummy},R24 'Write Rxx to address loaction
| + | |
| − | If Bdummy = Empfpuffer(5) Then 'Die Prüfsumme stimmt
| + | |
| − | 'Kommutieren deaktivieren, weil sonst die Ticks während dem Zugriff
| + | |
| − | 'geändert werden könnten
| + | |
| − | Pcicr = &B00000000
| + | |
| − | Ausgabeticks = Ticks
| + | |
| − | Ticks = 0
| + | |
| − | Pcicr = _pcicr
| + | |
| − | 'BCC für Sendemessage berechnen
| + | |
| − | !lds R24,{M1} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !LDs R25,{M2} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !add R24,R25 'Add Rxx + Ryy, Result in Rxx
| + | |
| − | !LDs R25,{M3} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !add R24,R25 'Add Rxx + Ryy, Result in Rxx
| + | |
| − | !LDs R25,{M4} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !add R24,R25 'Add Rxx + Ryy, Result in Rxx
| + | |
| − | !LDs R25,{M5} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !add R24,R25 'Add Rxx + Ryy, Result in Rxx
| + | |
| − | !LDs R25,{M6} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !add R24,R25 'Add Rxx + Ryy, Result in Rxx
| + | |
| − | !STS {Bdummy},R24 'Write Rxx to address loaction
| + | |
| − | 'Antwort am UART ausgeben
| + | |
| − | 'M1/M2=Spg M3/M4=Strom M5/M6=Loop Ticks Bdummy=Checksum
| + | |
| − | 'Print M1 ; M2 ; M3 ; M4 ; M5 ; M6 ; Bdummy ; 13
| + | |
| − | 'in Assembler geht das so...
| + | |
| − | !LdS R24,{M1} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten1:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten1
| + | |
| − | !LDS R24,{M2} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten2:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten2
| + | |
| − | !lds R24,{M3} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten3:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten3
| + | |
| − | !LDS R24,{M4} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten4:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten4
| + | |
| − | !LDS R24,{M5} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten5:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten5
| + | |
| − | !LDS R24,{M6} 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten6:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten6
| + | |
| − | !LDS R24,{bdummy}
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten7:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten7
| + | |
| − | !LDi R24,13
| + | |
| − | !STS udr,R24 'Write Rxx to address loaction
| + | |
| − | Warten8:
| + | |
| − | !LDS R24,UCSR0A 'Load Direct from data space @address xxx into Rxx
| + | |
| − | !BST R24,5 'Store bit x of Rxx in T Flag
| + | |
| − | !Brtc warten8
| + | |
| − | If Empfpuffer(3) < 3 Then 'Richtung
| + | |
| − | Notaus = 0
| + | |
| − | Loopcount = 0
| + | |
| − | Sollrichtung = Empfpuffer(3) 'Richtung
| + | |
| − | Sollspeed = Empfpuffer(4) 'PWM Breite
| + | |
| − | If Sollrichtung = 2 Then
| + | |
| − | Sollrichtung = 1
| + | |
| − | Notaus = 1
| + | |
| − | Loopcount = 250
| + | |
| − | Sollspeed = 0
| + | |
| − | End If
| + | |
| − | Setspeed
| + | |
| − | '<Messwerte berechnen>
| + | |
| − | 'Messwerte werden hier berechnet, weil genau jetzt 1/100s Zeit ist.
| + | |
| − | 'Spannung berechnen
| + | |
| − | Sdummy = Uwsum / Wcount
| + | |
| − | Sdummy = Sdummy - Uoffset
| + | |
| − | Sdummy = Sdummy * Ufaktor
| + | |
| − | Uzu = Int(sdummy)
| + | |
| − | Uwsum = 0
| + | |
| − | 'Strom berechnen
| + | |
| − | Sdummy = Iwsum / Wcount
| + | |
| − | Sdummy = Sdummy - Ioffset
| + | |
| − | Sdummy = Sdummy * Ifaktor
| + | |
| − | Izu = Int(sdummy)
| + | |
| − | Iwsum = 0
| + | |
| − | Wcount = 0
| + | |
| − | '</Messwerte berechnen>
| + | |
| − | Else 'wird nie erreicht weil weder Hauptsteuerung noch Display diese
| + | |
| − | 'Werte senden
| + | |
| − | Select Case Empfpuffer(3)
| + | |
| − | Case 3 'Sinus(1) empfangen
| + | |
| − | Sinus(1) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(1) , 17
| + | |
| − | Case 4 'Sinus(2) empfangen
| + | |
| − | Sinus(2) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(2) , 18
| + | |
| − | Case 5 'Sinus(3) empfangen
| + | |
| − | Sinus(3) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(3) , 19
| + | |
| − | Case 6 'Sinus(4) empfangen
| + | |
| − | Sinus(4) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(4) , 20
| + | |
| − | Case 7 'Sinus(5) empfangen
| + | |
| − | Sinus(5) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(5) , 21
| + | |
| − | Case 8 'Sinus(6) empfangen
| + | |
| − | Sinus(6) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(6) , 22
| + | |
| − | Case 9 'Sinus(7) empfangen
| + | |
| − | Sinus(7) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(7) , 23
| + | |
| − | Case 10 'Sinus(8) empfangen
| + | |
| − | Sinus(8) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(8) , 24
| + | |
| − | Case 11 'Sinus(9) empfangen
| + | |
| − | Sinus(9) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(9) , 25
| + | |
| − | Case 12 'Sinus(10) empfangen
| + | |
| − | Sinus(10) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(10) , 26
| + | |
| − | Case 13 'Sinus(11) empfangen
| + | |
| − | Sinus(11) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(11) , 27
| + | |
| − | Case 14 'Sinus(12) empfangen
| + | |
| − | Sinus(12) = Empfpuffer(4)
| + | |
| − | Writeeeprom Sinus(12) , 28
| + | |
| − | Case 15 'Spannung Kalibrieren (Byte 1)
| + | |
| − | Kal(1) = Empfpuffer(4)
| + | |
| − | Case 16 'Spannung Kalibrieren (Byte 2)
| + | |
| − | Kal(2) = Empfpuffer(4)
| + | |
| − | Sdummy = Uwsum / Wcount
| + | |
| − | Ufaktor = Kalibrierwert / Sdummy
| + | |
| − | Writeeeprom Ufaktor , 5
| + | |
| − | Uoffset = 0 'Schaltungsbedingt
| + | |
| − | Writeeeprom Uoffset , 1
| + | |
| − | Case 17 'Strom Kalibrieren (Byte 1)
| + | |
| − | Kal(1) = Empfpuffer(4)
| + | |
| − | Case 18 'Strom Kalibrieren Byte (2)
| + | |
| − | Kal(2) = Empfpuffer(4)
| + | |
| − | Sdummy = Iwsum / Wcount
| + | |
| − | If Kalibrierwert = 0 Then 'Das ist der Offset
| + | |
| − | Ioffset = Sdummy + 1
| + | |
| − | Writeeeprom Ioffset , 9
| + | |
| − | Else 'Jetzt den Faktor berechnen
| + | |
| − | Sdummy = Sdummy - Ioffset
| + | |
| − | Ifaktor = Kalibrierwert / Sdummy
| + | |
| − | Writeeeprom Ifaktor , 13
| + | |
| − | End If
| + | |
| − | Case 19
| + | |
| − | Vwinkel = Empfpuffer(4)
| + | |
| − | Writeeeprom Vwinkel , 29
| + | |
| − | Case 20
| + | |
| − | Rwinkel = Empfpuffer(4)
| + | |
| − | Writeeeprom Rwinkel , 30
| + | |
| − | End Select
| + | |
| − | End If
| + | |
| − | !LDI R24,0
| + | |
| − | !sTS {Empfpuffer(1)},R24 'Write Rxx to address loaction
| + | |
| − | !sTS {Empfpuffer(2)},R24 'Write Rxx to address loaction
| + | |
| − | !sTS {Empfpuffer(3)},R24 'Write Rxx to address loaction
| + | |
| − | !sTS {Empfpuffer(4)},R24 'Write Rxx to address loaction
| + | |
| − | !sTS {Empfpuffer(5)},R24 'Write Rxx to address loaction
| + | |
| − | End If
| + | |
| − | Enable Urxc
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | '</Serielle Telegramme abarbeiten>
| + | |
| − | | + | |
| − | 'Lüfter einschalten wenn Temperatur > 57 GradC
| + | |
| − | 'Lüfter ausschalten wenn Temperatur < 45 GradC
| + | |
| − | If Temp < 350 Then
| + | |
| − | Fan = 1
| + | |
| − | Fancount = 120000 'Nachlaufzeit, Zykluszeit 1/100 Sekunde = 150 Sekunden
| + | |
| − | Else
| + | |
| − | If Temp > 532 Then
| + | |
| − | If Fancount = 0 Then 'Nachlaufzeit beendet
| + | |
| − | Fan = 0
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | If Fancount > 0 Then Decr Fancount
| + | |
| − | | + | |
| − | 'Notaus mit Freilauf wenn keine Nachricht von Seriell
| + | |
| − | If Loopcount < 50 Then 'Das sind schätzungsweise 0.1s
| + | |
| − | Notaus = 0
| + | |
| − | Incr Loopcount
| + | |
| − | Else
| + | |
| − | Notaus = 1
| + | |
| − | Sollspeed = 0
| + | |
| − | Setspeed
| + | |
| − | End If
| + | |
| − | Loop
| + | |
| − | | + | |
| − | Kommutieren:
| + | |
| − | !push R10 'Rxx sichern
| + | |
| − | !PUSH R11 'Rxx sichern
| + | |
| − | !PUSH R16 'Rxx sichern
| + | |
| − | !PUSH R17 'Rxx sichern
| + | |
| − | !PUSH R20 'Rxx sichern
| + | |
| − | !PUSH R21 'Rxx sichern
| + | |
| − | !PUSH R24 'Rxx sichern
| + | |
| − | !PUSH R26 'Rxx sichern
| + | |
| − | !PUSH R27 'Rxx sichern
| + | |
| − | !IN R24,sreg
| + | |
| − | !PUSH R24
| + | |
| − | !clr R16 'Clear Rxx
| + | |
| − | #if Numhall = 3
| + | |
| − | !andi R17,&B01110111 'Clear Hall-D Bits
| + | |
| − | #else
| + | |
| − | !lds R17, $0023 'Port B input pins address. Hall D
| + | |
| − | !BST R17,0 'Store bit x of Rxx in T Flag. Hall D-Bit
| + | |
| − | !BLD R16,3 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | #endif
| + | |
| − | !LDS R17, $0029 'Port D input pins address. Hall A,B,C
| + | |
| − | !BST R17,2 'Store bit x of Rxx in T Flag. Hall C-Bit
| + | |
| − | !bld R16,2 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | !BST R17,4 'Store bit x of Rxx in T Flag. Hall B-Bit
| + | |
| − | !bld R16,1 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | !BST R17,7 'Store bit x of Rxx in T Flag. Hall A-Bit
| + | |
| − | !bld R16,0 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | 'R16 hat nun 0000DCBA Hall Signale
| + | |
| − | !lds R17,{aposition} 'Load Direct from data space @address xxx
| + | |
| − | !Swap R17 'R17 hat nun DCBA0000 Hall Signale
| + | |
| − | !andi R17,&B11110000 'Bit-And of Rxx with a constant value. Die 4 Bit sind Hall A...D
| + | |
| − | 'R17 hat nun nur noch die oberen 4 Bit
| + | |
| − | !add R17,R16 'Rxx + Ryy. Ergebnis in Rxx
| + | |
| − | !STS {aposition},R17 'Write Rxx to address loaction
| + | |
| − | !CLR R17
| + | |
| − | !LDI R26,$FF 'Startadresse von A() - 1
| + | |
| − | !LDI R27,$00
| + | |
| − | !ADD R26,R16
| + | |
| − | !ADC R27,R17
| + | |
| − | !LD R24,X 'Load Direct from address xxx
| + | |
| − | !LDS R16,{Sollrichtung} 'Load Direct from data space @address xxx
| + | |
| − | !CPI R16,0
| + | |
| − | !BREQ Sollrichtungnull 'Branch out if equal
| + | |
| − | !Jmp Sollrichtungnichtnull
| + | |
| − | Sollrichtungnull:
| + | |
| − | !LDS R20,{Vwinkel} 'Load Direct from data space @address xxx
| + | |
| − | !Add R24,R20
| + | |
| − | !JMP Richtunggesetzt
| + | |
| − | Sollrichtungnichtnull:
| + | |
| − | !LDS R20,{Rwinkel}
| + | |
| − | !Add R24,R20
| + | |
| − | Richtunggesetzt:
| + | |
| − | #if Numhall = 3
| + | |
| − | !CPI R24,$07 'Compare Rxx with constant 6 + 1 Sinusschritte
| + | |
| − | #else
| + | |
| − | !CPI R24,$0D 'Compare Rxx with constant 12 + 1 Sinusschritte
| + | |
| − | #endif
| + | |
| − | !BRCC Istgroesser13_1
| + | |
| − | !JMP Istkleiner13_1
| + | |
| − | Istgroesser13_1:
| + | |
| − | #if Numhall = 3
| + | |
| − | !SUBI R24,$06 'Subtract constant from Rxx, result in Rxx. 6 Sinusschritte
| + | |
| − | #else
| + | |
| − | !SUBI R24,$0C 'Subtract constant from Rxx, result in Rxx. 12 Sinusschritte
| + | |
| − | #endif
| + | |
| − | Istkleiner13_1:
| + | |
| − | !CLR R20
| + | |
| − | !Ldi R26,$0E 'Startadresse von S() - 1
| + | |
| − | !LDI R27,$01 'Startadresse von S() - 1
| + | |
| − | !ADD R26,R24
| + | |
| − | !ADC R27,R20
| + | |
| − | !LD R16,X 'Load Direct from address xxx
| + | |
| − | !STS {Ta},R16 'Write Rxx to address loaction
| + | |
| − | !subi R24,$fc
| + | |
| − | #if Numhall = 3
| + | |
| − | !CPI R24,$07 'Compare Rxx with constant 6 + 1 Sinusschritte
| + | |
| − | #else
| + | |
| − | !CPI R24,$0D 'Compare Rxx with constant 12 + 1 Sinusschritte
| + | |
| − | #endif
| + | |
| − | !BRCC Istgroesser13_2
| + | |
| − | !JMP Istkleiner13_2
| + | |
| − | Istgroesser13_2:
| + | |
| − | #if Numhall = 3
| + | |
| − | !SUBI R24,$06 'Subtract constant from Rxx, result in Rxx. 6 Sinusschritte
| + | |
| − | #else
| + | |
| − | !SUBI R24,$0C 'Subtract constant from Rxx, result in Rxx. 12 Sinusschritte
| + | |
| − | #endif
| + | |
| − | Istkleiner13_2:
| + | |
| − | !CLR R20
| + | |
| − | !Ldi R26,$0E 'Startadresse von S() - 1
| + | |
| − | !LDI R27,$01 'Startadresse von S() - 1
| + | |
| − | !ADD R26,R24
| + | |
| − | !ADC R27,R20
| + | |
| − | !LD R16,X 'Load Direct from address xxx
| + | |
| − | !STS {Tc},R16 'Write Rxx to address loaction
| + | |
| − | !subi R24,$fc
| + | |
| − | #if Numhall = 3
| + | |
| − | !CPI R24,$07 'Compare Rxx with constant 6 + 1 Sinusschritte
| + | |
| − | #else
| + | |
| − | !CPI R24,$0D 'Compare Rxx with constant 12 + 1 Sinusschritte
| + | |
| − | #endif
| + | |
| − | !BRCC Istgroesser13_3
| + | |
| − | !JMP Istkleiner13_3
| + | |
| − | Istgroesser13_3:
| + | |
| − | #if Numhall = 3
| + | |
| − | !SUBI R24,$06 'Subtract constant from Rxx, result in Rxx. 6 Sinusschritte
| + | |
| − | #else
| + | |
| − | !SUBI R24,$0C 'Subtract constant from Rxx, result in Rxx. 12 Sinusschritte
| + | |
| − | #endif
| + | |
| − | Istkleiner13_3:
| + | |
| − | !CLR R20
| + | |
| − | !Ldi R26,$0E 'Startadresse von S() - 1
| + | |
| − | !LDI R27,$01 'Startadresse von S() - 1
| + | |
| − | !ADD R26,R24
| + | |
| − | !ADC R27,R20
| + | |
| − | !LD R16,X 'Load Direct from address xxx
| + | |
| − | !STS {Tb},R16 'Write Rxx to address loaction
| + | |
| − | !lds R10,{aposition}
| + | |
| − | !CLR R11 'Clear Rxx
| + | |
| − | !LDI R26,$1A 'Startadresse von Richtung() - 1
| + | |
| − | !LDI R27,$01 'Startadresse von Richtung() - 1
| + | |
| − | !ADD R26,R10 'move Ptr by {aposition} innnerhalb Richtung()
| + | |
| − | !ADC R27,R11 'Add Zero
| + | |
| − | !LD R16,X+ 'Load Rxx with data from address in X Register(R26, R27) and increment Ptr
| + | |
| − | 'R16 hat Inhalt von Richtung(X+)
| + | |
| − | !CLR R17 'Clear Rxx
| + | |
| − | !LDI R20,$02 '2 Byte
| + | |
| − | !LDI R21,$00
| + | |
| − | !Sub R16 , R20 'Werte von einander abziehen
| + | |
| − | !SBC R17,R21 'Werte von einander abziehen
| + | |
| − | !LDI R26,$1A 'Startadresse von IstRichtung()
| + | |
| − | !LDI R27,$02 'Startadresse von IstRichtung()
| + | |
| − | !ST X+,R16 'Store Rxx in address in X + 1 Register
| + | |
| − | !ST X,R17
| + | |
| − | !LDI R26,$41 'Startadresse von Ticks()
| + | |
| − | !LDI R27,$02 'Startadresse von Ticks()
| + | |
| − | !LD R16,X+ 'Load Rxx with data from address in X Register
| + | |
| − | !LD R17,X
| + | |
| − | !LDI R26,$1A 'Startadresse von IstRichtung()
| + | |
| − | !LDI R27,$02 'Startadresse von IstRichtung()
| + | |
| − | !LD R20,X+ 'Load Rxx with data from address in X Register
| + | |
| − | !LD R21,X
| + | |
| − | !ADD R16,R20
| + | |
| − | !ADC R17,R21
| + | |
| − | !LDI R26,$41 'Startadresse von Ticks()
| + | |
| − | !LDI R27,$02 'Startadresse von Ticks()
| + | |
| − | !ST X+,R16 'Store Rxx in address in X + 1 Register
| + | |
| − | !ST X,R17
| + | |
| − | !LDS R24,timsk2
| + | |
| − | !ORI R24,$01
| + | |
| − | !STS timsk2,R24 'Write Rxx to address loaction
| + | |
| − | !POP R24
| + | |
| − | !Out Sreg , R24
| + | |
| − | !POP R27 'Rxx wieder herstellen
| + | |
| − | !POP R26'Rxx wieder herstellen
| + | |
| − | !POP R24'Rxx wieder herstellen
| + | |
| − | !POP R21 'Rxx wieder herstellen
| + | |
| − | !POP R20 'Rxx wieder herstellen
| + | |
| − | !POP R17'Rxx wieder herstellen
| + | |
| − | !POP R16 'Rxx wieder herstellen
| + | |
| − | !POP R11 'Rxx wieder herstellen
| + | |
| − | !POP R10 'Rxx wieder herstellen
| + | |
| − | Return
| + | |
| − | | + | |
| − | Update_pwm:
| + | |
| − | 'Ta, Tb und Tc sind die Amplituden der 3 Phasen
| + | |
| − | !PUSH R24
| + | |
| − | !IN R24,sreg
| + | |
| − | !PUSH R24
| + | |
| − | !lds R24,{Ta}
| + | |
| − | !STS ocr2a,R24 'Write Rxx to address loaction
| + | |
| − | !STS ocr2b,R24
| + | |
| − | !LDS R24,{Tb}
| + | |
| − | !STS ocr1al,R24 'Write Rxx to address loaction
| + | |
| − | !STS ocr1bl,R24
| + | |
| − | !lds R24,{Tc}
| + | |
| − | !Out Ocr0a , R24
| + | |
| − | !Out Ocr0b , R24
| + | |
| − | !LDS R24,timsk2
| + | |
| − | !ANDI R24,$FE
| + | |
| − | !STS timsk2,R24 'Write Rxx to address loaction
| + | |
| − | !POP R24 'Rxx wieder herstellen
| + | |
| − | !Out Sreg , R24
| + | |
| − | !POP R24 'Rxx wieder herstellen
| + | |
| − | Return
| + | |
| − | | + | |
| − | Datenempfang:
| + | |
| − | 'Die empfangenen Zeichen im nach links laufenden Umlauf in Empfpuffer(1)..Empfpuffer(6) geschrieben
| + | |
| − | 'Dadurch wir sichergestellt, dass das Startzeichen (CR) irgendwann in EP0 steht
| + | |
| − | !PUSH R24 'Rxx sichern
| + | |
| − | !IN R24, SREG 'Statusregistr sichern
| + | |
| − | !PUSH R24
| + | |
| − | 'Zeichen im Puffer nach links schieben
| + | |
| − | !LDS R24,{Empfpuffer(2)} 'Load Direct from data space @address xxx
| + | |
| − | !STS {Empfpuffer(1)},R24 'Write Rxx to address loaction
| + | |
| − | !LDS R24,{Empfpuffer(3)} 'Load Direct from data space @address xxx
| + | |
| − | !STS {Empfpuffer(2)},R24 'Write Rxx to address loaction
| + | |
| − | !LDS R24,{Empfpuffer(4)} 'Load Direct from data space @address xxx
| + | |
| − | !STS {Empfpuffer(3)},R24 'Write Rxx to address loaction
| + | |
| − | !LDS R24,{Empfpuffer(5)} 'Load Direct from data space @address xxx
| + | |
| − | !STS {Empfpuffer(4)},R24 'Write Rxx to address loaction
| + | |
| − | !LDS R24,{Empfpuffer(6)} 'Load Direct from data space @address xxx
| + | |
| − | !STS {Empfpuffer(5)},R24 'Write Rxx to address loaction
| + | |
| − | 'neues Zeichen einlesen
| + | |
| − | !IN R24,UDR 'Load an I/O Location to Rxx
| + | |
| − | !STs {Empfpuffer(6)},R24 'Write Rxx to address loaction
| + | |
| − | !POP R24 'Rxx wieder herstellen
| + | |
| − | !Out Sreg , R24 'Statusregister wieder herstellen
| + | |
| − | !POP R24 'Rxx wieder herstellen
| + | |
| − | Return
| + | |
| − | | + | |
| − | Sub Setspeed
| + | |
| − | If Notaus = 1 Then
| + | |
| − | Pwm_stop
| + | |
| − | Sollspeed = 0
| + | |
| − | For N = 1 To 12
| + | |
| − | S(n) = 0
| + | |
| − | Next
| + | |
| − | Else
| + | |
| − | #if Numhall = 3 'Anzahl Hallsensoren
| + | |
| − | For N = 1 To 6
| + | |
| − | Idummy1 = Sollspeed * Sinus(n)
| + | |
| − | Idummy1 = Idummy1 / 100
| + | |
| − | S(n) = Idummy1
| + | |
| − | Next
| + | |
| − | #else
| + | |
| − | For N = 1 To 12
| + | |
| − | Idummy1 = Sollspeed * Sinus(n)
| + | |
| − | Idummy1 = Idummy1 / 100
| + | |
| − | S(n) = Idummy1
| + | |
| − | Next
| + | |
| − | #endif
| + | |
| − | | + | |
| − | If Tccr0a = 0 Then Pwm_start 'Wenn die PWM aus ist
| + | |
| − | | + | |
| − | '<Zwangskommutieren??>
| + | |
| − | Zwangskommutieren = 0
| + | |
| − | If Sollrichtung <> Altsollrichtung Then Zwangskommutieren = 1
| + | |
| − | If Sollspeed <> Altsollspeed Then Zwangskommutieren = 1
| + | |
| − | | + | |
| − | If Zwangskommutieren = 1 Then
| + | |
| − | Pcicr = &B00000000 'Den eigentlichen Kommutierinterrupt abschalten
| + | |
| − | !clr R16 'Clear Register 16
| + | |
| − | !lds R17, $0023 'Load Direct from data space @address xxx
| + | |
| − | !BST R17,0 'Store bit x of Rxx in T Flag
| + | |
| − | !BLD R16,3 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | !LDS R17, $0029 'Load Direct from data space @address xxx
| + | |
| − | !BST R17,2 'Store bit x of Rxx in T Flag
| + | |
| − | !bld R16,2 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | !BST R17,4 'Store bit x of Rxx in T Flag
| + | |
| − | !bld R16,1 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | !BST R17,7 'Store bit x of Rxx in T Flag
| + | |
| − | !bld R16,0 'Copy T Flag in the SREG (Status Register) to Bit x in Rxx
| + | |
| − | !lds R17,{aposition} 'Load Direct from data space @address xxx
| + | |
| − | !Swap R17 'Swap high and low nibbles in Rxx. aposition is now in the upper nibble
| + | |
| − | !andi R17,&B11110000 'Logical AND Rxx and a constant, Result in Rxx. Clear lower nibble
| + | |
| − | !add R17,R16 'Add Rxx + Ryy, Result in Rxx
| + | |
| − | !STS {aposition},R17 'Write Rxx to address loaction
| + | |
| − | !CLR R17 'Clear Rxx
| + | |
| − | !LDI R26,$FF 'Startadresse von A() - 1
| + | |
| − | !LDI R27,$00 'Startadresse von A() - 1
| + | |
| − | !ADD R26,R16 'Add Rxx + Ryy without carry, Result in Rxx
| + | |
| − | !ADC R27,R17 'Add Rxx + Ryy with carry, Result in Rxx
| + | |
| − | !LD R24,X 'Load Indirect Rxx with address in X Register
| + | |
| − | !LDS R16,{Sollrichtung} 'Load Direct from data space @address xxx
| + | |
| − | !CPI R16,0 'Compare Rxx with constant
| + | |
| − | !BREQ Sollrichtungnullz 'Branch if Equal
| + | |
| − | !Jmp Sollrichtungnichtnullz 'Relative Jump
| + | |
| − | Sollrichtungnullz:
| + | |
| − | !LDS R20,{Vwinkel} 'Load Direct from data space @address xxx
| + | |
| − | !Add R24,R20 'Add Rxx + Ryy, Result in Rxx
| + | |
| − | !JMP Richtunggesetztz
| + | |
| − | Sollrichtungnichtnullz:
| + | |
| − | !LDS R20,{Rwinkel} 'Load Direct from data space @address xxx
| + | |
| − | !Add R24,R20 'Add Rxx + Ryy without carry, Result in Rxx
| + | |
| − | Richtunggesetztz:
| + | |
| − | #if Numhall = 3
| + | |
| − | !CPI R24,$07 'Compare Rxx with constant 6 + 1 Sinusschritte
| + | |
| − | #else
| + | |
| − | !CPI R24,$0D 'Compare Rxx with constant 12 + 1 Sinusschritte
| + | |
| − | #endif
| + | |
| − | !BRCC Istgroesser13_1z 'Branch if Carry Cleared
| + | |
| − | !JMP Istkleiner13_1z 'Relative Jump
| + | |
| − | Istgroesser13_1z:
| + | |
| − | #if Numhall = 3
| + | |
| − | !SUBI R24,$06 'Subtract constant from Rxx, result in Rxx. 6 Sinusschritte
| + | |
| − | #else
| + | |
| − | !SUBI R24,$0C 'Subtract constant from Rxx, result in Rxx. 12 Sinusschritte
| + | |
| − | #endif
| + | |
| − | Istkleiner13_1z:
| + | |
| − | !CLR R20 'Clear Rxx
| + | |
| − | !Ldi R26,$0E 'Startadresse von S() - 1
| + | |
| − | !LDI R27,$01 'Startadresse von S() - 1
| + | |
| − | !ADD R26,R24 'Add Rxx + Ryy without carry, Result in Rxx
| + | |
| − | !ADC R27,R20 'Add Rxx + Ryy with carry, Result in Rxx
| + | |
| − | !LD R16,X 'Load Rxx with data from address in X Register
| + | |
| − | !STS {Ta},R16 'Write Rxx to address loaction
| + | |
| − | !subi R24,$fc 'Subtract constant from Rxx, result in Rxx
| + | |
| − | #if Numhall = 3
| + | |
| − | !CPI R24,$07 'Compare Rxx with constant 6 + 1 Sinusschritte
| + | |
| − | #else
| + | |
| − | !CPI R24,$0D 'Compare Rxx with constant 12 + 1 Sinusschritte
| + | |
| − | #endif
| + | |
| − | !BRCC Istgroesser13_2z 'Branch if Carry Cleared
| + | |
| − | !JMP Istkleiner13_2z 'Relative Jump
| + | |
| − | Istgroesser13_2z:
| + | |
| − | #if Numhall = 3
| + | |
| − | !SUBI R24,$06 'Subtract constant from Rxx, result in Rxx. 6 Sinusschritte
| + | |
| − | #else
| + | |
| − | !SUBI R24,$0C 'Subtract constant from Rxx, result in Rxx. 12 Sinusschritte
| + | |
| − | #endif
| + | |
| − | Istkleiner13_2z:
| + | |
| − | !CLR R20 'Clear Rxx
| + | |
| − | !Ldi R26,$1a 'Startadresse von S() - 1
| + | |
| − | !LDI R27,$01 'Startadresse von S() - 1
| + | |
| − | !ADD R26,R24 'Add Rxx + Ryy without carry, Result in Rxx
| + | |
| − | !ADC R27,R20 'Add Rxx + Ryy with carry, Result in Rxx
| + | |
| − | !LD R16,X 'Load Rxx with data from address in X Register
| + | |
| − | !STS {Tc},R16 'Write Rxx to address loaction
| + | |
| − | !subi R24,$fc 'Subtract constant from Rxx, result in Rxx
| + | |
| − | #if Numhall = 3
| + | |
| − | !CPI R24,$07 'Compare Rxx with constant 6 + 1 Sinusschritte
| + | |
| − | #else
| + | |
| − | !CPI R24,$0D 'Compare Rxx with constant 12 + 1 Sinusschritte
| + | |
| − | #endif
| + | |
| − | !BRCC Istgroesser13_3z 'Branch if Carry Cleared
| + | |
| − | !JMP Istkleiner13_3z 'Relative Jump
| + | |
| − | Istgroesser13_3z:
| + | |
| − | #if Numhall = 3
| + | |
| − | !SUBI R24,$06 'Subtract constant from Rxx, result in Rxx. 6 Sinusschritte
| + | |
| − | #else
| + | |
| − | !SUBI R24,$0C 'Subtract constant from Rxx, result in Rxx. 12 Sinusschritte
| + | |
| − | #endif
| + | |
| − | Istkleiner13_3z:
| + | |
| − | !CLR R20 'Clear Rxx
| + | |
| − | !Ldi R26,$1a 'Startadresse von S() - 1
| + | |
| − | !LDI R27,$01 'Startadresse von S() - 1
| + | |
| − | !ADD R26,R24 'Add Rxx + Ryy without carry , Result in Rxx
| + | |
| − | !ADC R27,R20 'Add Rxx + Ryy with carry, Result in Rxx
| + | |
| − | !LD R16,X 'Load Rxx with data from address in X Register
| + | |
| − | !STS {Tb},R16 'Write Rxx to address loaction
| + | |
| − | Pcicr = _pcicr 'Den eigentlichen Kommutierinterrupt einschalten
| + | |
| − | Timsk2.toie2 = 1 'Timer2 Overflow Interrupt aktivieren
| + | |
| − | Toggle Led2
| + | |
| − | End If
| + | |
| − | '</Zwangskommutieren>
| + | |
| − | End If
| + | |
| − | Altsollrichtung = Sollrichtung
| + | |
| − | Altsollspeed = Sollspeed
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Sub Pwm_start
| + | |
| − | Disable Interrupts 'Damit die Timer auch wirklich synchron laufen
| + | |
| − | Tccr0a = 161 'Timer Counter Control Register A
| + | |
| − | Tccr0b = 1 'Timer Counter Control Register B
| + | |
| − | Ocr0a = 0 'Set output compare Ctr 0, Register A, continuously compared with TCNT0
| + | |
| − | Ocr0b = 0 'Set output compare Ctr 0, Register B, continuously compared with TCNT0
| + | |
| − | Tccr1a = 161 'Timer Counter Control Register 1A
| + | |
| − | Tccr1b = 1 'Timer Counter Control Register 1B
| + | |
| − | Ocr1ah = 0 'Output A compare value in H and L Bytes
| + | |
| − | Ocr1al = 0
| + | |
| − | Ocr1bh = 0 'Output B compare value in H and L Bytes
| + | |
| − | Ocr1bl = 0
| + | |
| − | Tccr2a = 161 'Timer Counter Control Register 2A
| + | |
| − | Tccr2b = 1 'Timer Counter Control Register 2B
| + | |
| − | Ocr2a = 0 'Set output compare Ctr 2, Register A, continuously compared with TCNT0
| + | |
| − | Ocr2b = 0 'Set output compare Ctr 2, Register B, continuously compared with TCNT0
| + | |
| − | Tcnt0 = 0 'Timer Startwert
| + | |
| − | Tcnt1 = 6 'Timer Startwert, Wert anders damit sie alle synchron laufen
| + | |
| − | Tcnt2 = 9 'Timer Startwert, Wert anders damit sie alle synchron laufen
| + | |
| − | Enable Interrupts
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Sub Pwm_stop
| + | |
| − | Tccr0a = 0 'Timer Counter Control Register A
| + | |
| − | Tccr0b = 0 'Timer Counter Control Register B
| + | |
| − | Ocr0a = 0 'Set output compare Ctr 0, Register A, continuously compared with TCNT0
| + | |
| − | Ocr0b = 0 'Set output compare Ctr 0, Register B, continuously compared with TCNT0
| + | |
| − | Tccr1a = 0 'Timer Counter Control Register 1A
| + | |
| − | Tccr1b = 0 'Timer Counter Control Register 1B
| + | |
| − | Ocr1ah = 0 'Output A compare value in H and L Bytes
| + | |
| − | Ocr1al = 0
| + | |
| − | Ocr1bh = 0 'Output B compare value in H and L Bytes
| + | |
| − | Ocr1bl = 0
| + | |
| − | Tccr2a = 0 'Timer Counter Control Register 2A
| + | |
| − | Tccr2b = 0 'Timer Counter Control Register 2B
| + | |
| − | Ocr2a = 0 'Set output compare Ctr 2, Register A, continuously compared with TCNT0
| + | |
| − | Ocr2b = 0 'Set output compare Ctr 2, Register B, continuously compared with TCNT0
| + | |
| − | 'alle Phasen Aus
| + | |
| − | Portd.3 = 0 'A+
| + | |
| − | Portb.3 = 1 'A-
| + | |
| − | Portb.2 = 0 'B+
| + | |
| − | Portb.1 = 1 'B-
| + | |
| − | Portd.5 = 0 'C+
| + | |
| − | Portd.6 = 1 'C-
| + | |
| − | End Sub
| + | |
| − | </pre>
| + | |
| − | | + | |
| − | '''Hauptsteuerung.bas (BASCOM)'''
| + | |
| − | <pre>
| + | |
| − | '( ******************Listrik01 Hauptsteuerung, Version 01 ******************
| + | |
| − | | + | |
| − | 1. LED1 blinkt mit 1 Hz wenn alles OK
| + | |
| − | | + | |
| − | 2. LED1 und LED2 blinken mit 5Hz wenn I2c-Bus gestört ist
| + | |
| − | | + | |
| − | 3. LED1 und LED2 blinken mit bis zu 10Hz wenn U-Batt zu klein ist. Frequenz hängt
| + | |
| − | von der Anzahl Interrups ab, die während der Wartezeit auflaufen, z.B. von COM
| + | |
| − | | + | |
| − | 4. Lade-LEDs
| + | |
| − | - blinken mit 4Hz wenn Gyro nicht auf Null ist
| + | |
| − | - blinken mit 5Hz wenn Reset button gedrückt wird und Gyrosignale groß sind
| + | |
| − | - machen Lichtorgel wenn Kopplung zum Motorcontroler gestört ist. Siehe Punkt 6
| + | |
| − | | + | |
| − | 5. Gyro wird nur zur Initialisierung benutzt. Fahrzeug muss still stehen beim START
| + | |
| − | | + | |
| − | 6. Kommunikation zum Motorcontroller ist gestört (Timeout) wenn der Hallstecker
| + | |
| − | am Motorcontroller nicht steckt sind! Dadurch antwortet der Motorcontroller dem
| + | |
| − | Hauptcontroller nicht. Er sendet z.B. keine Spannungsinfo an den Hauptcontroller.
| + | |
| − | Dadurch macht Dieser ständig einen Restart. Viele Werte werden dann nicht zum
| + | |
| − | Dashboard übertragen!
| + | |
| − | | + | |
| − | LockBit, FuseBit , FuseBitHigh , FuseBitExtended
| + | |
| − | $prog &HFF , &HE7 , &HD9 , &HFF 'Fusebits für Atmega644PA 20MHz
| + | |
| − | | + | |
| − | Use AMTEL Studio / Fuses Menu instead to set fusebits
| + | |
| − | BODLEVEL = disabled
| + | |
| − | OCDEN = Disabled
| + | |
| − | JTAGEN = Disabled
| + | |
| − | SPIEN = Checked
| + | |
| − | WDTON = Disabled
| + | |
| − | EESAVE = Disabled
| + | |
| − | BOOTSZ = 4096W_7000
| + | |
| − | BOOTRST = Disabled
| + | |
| − | CKDIV8 = Disabled
| + | |
| − | CKOUT = Disabled
| + | |
| − | SUT_CKSEL = FSOSZ_16KCK_4MS1_XOSC_FASTPWR
| + | |
| − | ')
| + | |
| − | | + | |
| − | $regfile = "m644def.dat" 'ATMEGA644PA CPU
| + | |
| − | $lib "i2c_twi.lbx"
| + | |
| − | $framesize = 64
| + | |
| − | $swstack = 64
| + | |
| − | $hwstack = 64
| + | |
| − | $crystal = 20000000
| + | |
| − | $baud = 57600 'No parity, 1 stop bit, 8 data bits
| + | |
| − | | + | |
| − | Declare Sub Onresetbtn
| + | |
| − | Declare Sub Logtext(byval Adresse As Word , Text As String )
| + | |
| − | Declare Sub Akkugrenzen
| + | |
| − | Declare Sub Unfalldatenschreiber
| + | |
| − | Declare Sub Betriebsdatenschreiber
| + | |
| − | Declare Sub Flashled(byval Which As Byte , Byval Dauer_ms As Byte)
| + | |
| − | Declare Sub Resetdata
| + | |
| − | | + | |
| − | ' Porta.0 = ADC
| + | |
| − | ' Porta.1 = ADC
| + | |
| − | Config Porta.2 = Input 'not used
| + | |
| − | Config Porta.3 = Input 'not used
| + | |
| − | Config Porta.4 = Input 'not used
| + | |
| − | Config Porta.5 = Input 'not used
| + | |
| − | Config Porta.6 = Input 'not used
| + | |
| − | Config Porta.7 = Input 'not used
| + | |
| − | 'Pull up Widerstände der unbenutzten Eingänge einschalten
| + | |
| − | Porta = 1
| + | |
| − | | + | |
| − | Config Portb.0 = Input 'not used
| + | |
| − | Config Portb.1 = Output 'Gyro Self Test
| + | |
| − | Config Portb.2 = Output 'Gyro Reset
| + | |
| − | Config Portb.3 = Output 'Led 2
| + | |
| − | Config Portb.4 = Output 'LED 1
| + | |
| − | ' PORTB.5 'MOSI
| + | |
| − | ' PORTB.6 'MISO
| + | |
| − | ' PORTB.7 'SCK
| + | |
| − | | + | |
| − | Config Scl = Portc.0
| + | |
| − | Config Sda = Portc.1
| + | |
| − | | + | |
| − | Config Portc.2 = Input 'Fussschalter 1
| + | |
| − | Config Portc.3 = Input 'Fussschalter 2
| + | |
| − | Config Portc.4 = Input 'not used
| + | |
| − | Config Portc.5 = Input 'not used
| + | |
| − | Config Portc.6 = Input 'not used
| + | |
| − | Config Portc.7 = Output 'Beeper
| + | |
| − | 'Pull up Widerstände der Eingänge Ein/Ausschalten
| + | |
| − | Portc.2 = 0
| + | |
| − | Portc.3 = 0
| + | |
| − | Portc.4 = 1
| + | |
| − | Portc.5 = 1
| + | |
| − | Portc.6 = 1
| + | |
| − | | + | |
| − | ' PORTD.0 = 'RXD
| + | |
| − | ' PORTD.1 = 'TXD
| + | |
| − | Config Portd.2 = Input 'Reset Button vom Akku-Display
| + | |
| − | Config Portd.3 = Output 'Batterieanzeige
| + | |
| − | Config Portd.4 = Output 'Batterieanzeige
| + | |
| − | Config Portd.5 = Output 'Batterieanzeige
| + | |
| − | Config Portd.6 = Output 'Batterieanzeige
| + | |
| − | Config Portd.7 = Output 'Batterieanzeige
| + | |
| − | 'Pull up Widerstände einschalten
| + | |
| − | Portd.2 = 1
| + | |
| − | | + | |
| − | Led1 Alias Portb.4
| + | |
| − | Led2 Alias Portb.3
| + | |
| − | Led3 Alias Portd.4 'Batterieladezustandsanzeige 0..20%
| + | |
| − | Led4 Alias Portd.5 'Batterieladezustandsanzeige 21..40%
| + | |
| − | Led5 Alias Portd.6 'Batterieladezustandsanzeige 41..60%
| + | |
| − | Led6 Alias Portd.3 'Batterieladezustandsanzeige 61..80%
| + | |
| − | Led7 Alias Portd.7 'Batterieladezustandsanzeige 81..100%
| + | |
| − | | + | |
| − | Beeper Alias Portc.7
| + | |
| − | Resetbtn Alias Pind.2
| + | |
| − | | + | |
| − | 'Sensortest gibt es bei I2C Gyro nicht
| + | |
| − | 'Sensor_aus Alias Portb.2 '1=Aus 0=Ein
| + | |
| − | 'Sensor_test Alias Portb.1 '1=Self-Test. 0=Normalbetrieb
| + | |
| − | | + | |
| − | Config Debounce = 100 '[mS] when the config statement is not used a
| + | |
| − | ' default of 25mS will be used
| + | |
| − | '******************************Gyro über I2C ********************************
| + | |
| − | '##### 7 - Bit Adresses Gyro ########
| + | |
| − | Const Who_am_i = &H0F 'auch V2
| + | |
| − | Const Ctrl_reg1 = &H20 'auch V2
| + | |
| − | Const Ctrl_reg2 = &H21 'auch V2
| + | |
| − | Const Ctrl_reg3 = &H22 'auch V2
| + | |
| − | Const Ctrl_reg4 = &H23 'auch V2
| + | |
| − | Const Ctrl_reg5 = &H24 'auch V2
| + | |
| − | Const Out_temp = &H26 'auch V2
| + | |
| − | Const Status_reg = &H27 'auch V2
| + | |
| − | Const Out_x_l = &H28 'auch V2
| + | |
| − | Const Out_x_h = &H29 'auch V2
| + | |
| − | Const Out_y_l = &H2A 'auch V2
| + | |
| − | Const Out_y_h = &H2B 'auch V2
| + | |
| − | Const Out_z_l = &H2C 'auch V2
| + | |
| − | Const Out_z_h = &H2D 'auch V2
| + | |
| − | '##### 7-Bit Adresses Accelerometer ########
| + | |
| − | Const Ctrl_reg1_a = &H20 'auch V2
| + | |
| − | Const Ctrl_reg2_a = &H21 'auch V2
| + | |
| − | Const Ctrl_reg3_a = &H22 'auch V2
| + | |
| − | Const Ctrl_reg4_a = &H23 'auch V2
| + | |
| − | Const Ctrl_reg5_a = &H24 'auch V2
| + | |
| − | Const Status_reg_a = &H27 'auch V2
| + | |
| − | Const Out_x_l_a = &H28 'auch V2
| + | |
| − | Const Out_x_h_a = &H29 'auch V2
| + | |
| − | Const Out_y_l_a = &H2A 'auch V2
| + | |
| − | Const Out_y_h_a = &H2B 'auch V2
| + | |
| − | Const Out_z_l_a = &H2C 'auch V2
| + | |
| − | Const Out_z_h_a = &H2D 'auch V2
| + | |
| − | '##### 7-Bit Adresses Magnetometer ########
| + | |
| − | 'Const Cra_reg_m = &H00 'auch V2
| + | |
| − | 'Const Crb_reg_m = &H01 'auch V2
| + | |
| − | 'Const Mr_reg_m = &H02 'auch V2
| + | |
| − | 'Const Out_x_h_m = &H03 'auch V2
| + | |
| − | | + | |
| − | 'Immer *2 weil Adresse bei Bit1 beginnt. Bit 0 ist für Read/Write
| + | |
| − | Const Gyroadress_w = 210 '=105*2, =107d*2 bei V2. Gyro slave adress for write
| + | |
| − | Const Gyroadress_r = 211 '=(105*2) + 1, =107d*2 bei V2. Gyro slave adress for write
| + | |
| − | Const Accadress_w = 48 '=24*2, auch bei V2 Accelerometer slave adress for write
| + | |
| − | Const Accadress_r = 49 '=(24*2) + 1, auch bei V2 Accelerometer slave adress for write
| + | |
| − | | + | |
| − | 'Const Magadress_w = 60 '=30*2, auch bei V2 Magnetometer slave adress for write
| + | |
| − | 'Const Magadress_r = 61 '=(30*2) + 1, auch bei V2 Magnetometer slave adress for write
| + | |
| − | '--------------------------------------------------------------------
| + | |
| − | | + | |
| − | '>>>>>>>>>>>>>>>> DEFAULT WERTE <<<<<<<<<<<<<<<<<<
| + | |
| − | | + | |
| − | Const Fussschalterschwelle = 750 'ADC Wert
| + | |
| − | | + | |
| − | 'Konstanten für die Geschwindigkeits und Streckenmessung
| + | |
| − | Const Kom_pro_u = 276 '276*Kommutieren für eine Umdrehung.
| + | |
| − | Const Radumpfang = 139 'RaduMPFang in Zentimeter
| + | |
| − | 'Maximalwert bis zu dem die Abweichung in y aufaddiert wird
| + | |
| − | Const Max_mit_acc_nick_s = 1024
| + | |
| − | Const Min_mit_acc_nick_s = -1024
| + | |
| − | Const Max_lenk = 128
| + | |
| − | Const Min_lenk = -128
| + | |
| − | 'Konstanten für die Leistungsbegrenzung, Geschwindigkeitsbegrenzung
| + | |
| − | 'Maximalleistung
| + | |
| − | Const Maxpwm = 255
| + | |
| − | Const Minpwm = -255
| + | |
| − | 'PWM ab der automatisch gebremst wird um blos nie an die Grenze zu kommen
| + | |
| − | Const Spwm = 128
| + | |
| − | Const Spwmr = -128
| + | |
| − | 'Offsetwerte für die Mittellage
| + | |
| − | Const Offset_roll = 67700
| + | |
| − | Const Offset_nick = 65400
| + | |
| − | Const O_roll_u = 66200
| + | |
| − | Const O_roll_o = 69200
| + | |
| − | Const O_nick_u = 63900
| + | |
| − | Const O_nick_o = 66900
| + | |
| − | Const O_nick_oo = 67700
| + | |
| − | | + | |
| − | Const Vmax = 120 '12kmh Vmax Vorwärts in km/h*10
| + | |
| − | Const Vmaxr = -120 '-12Kmh Vmax Rückwärts in km/h*10
| + | |
| − | | + | |
| − | Const Systemvoltage = 14 '14, 24, 36, 48V
| + | |
| − | | + | |
| − | 'Konstanten für die Akkus
| + | |
| − | #if Systemvoltage = 14 'Nur zum Test mit Netzteil
| + | |
| − | Const Akkuleer = 1300
| + | |
| − | Const Akkufastleer = 1330
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 24
| + | |
| − | '24V, 12V pro Akku * 2 Akku
| + | |
| − | Const Akkuleer = 2400
| + | |
| − | Const Akkufastleer = 2500
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 36
| + | |
| − | '36V, 12V pro Akku * 3 Akku
| + | |
| − | Const Akkuleer = 3600
| + | |
| − | Const Akkufastleer = 3750
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 48
| + | |
| − | '48V, 12V pro Akku * 4 Akku
| + | |
| − | Const Akkuleer = 4800
| + | |
| − | Const Akkufastleer = 4950
| + | |
| − | #endif
| + | |
| − | | + | |
| − | 'Konstanten für die Signalaufbereitung
| + | |
| − | Const Gyro_anz = 10 'war 10000
| + | |
| − | Const Acc_anz = 5 'Anzahl der Messungen zur Mittelwertbildung
| + | |
| − | Const Gyro_faktor = 1 'war 91
| + | |
| − | '****************************************************************************
| + | |
| − | | + | |
| − | Dim Ugemessen As Long 'Batteriespannung in V*100, kommt vom Motorcontr.
| + | |
| − | Dim Igemessen As Long 'Gesamter Motorstrom in mA, kommt vom Motorcontr.
| + | |
| − | | + | |
| − | Dim U As Integer
| + | |
| − | Dim I As Integer At U + 2
| + | |
| − | Dim K As Integer At U + 4
| + | |
| − | Dim Checksumme As Byte At U + 6
| + | |
| − | Dim Ende As Byte At U + 7
| + | |
| − | Dim Motormeldung(8) As Byte At U + 0 Overlay
| + | |
| − | | + | |
| − | Dim M1 As Byte At U + 0 Overlay
| + | |
| − | Dim M2 As Byte At U + 1 Overlay
| + | |
| − | Dim M3 As Byte At I + 0 Overlay
| + | |
| − | Dim M4 As Byte At I + 1 Overlay
| + | |
| − | Dim M5 As Byte At K + 0 Overlay
| + | |
| − | Dim M6 As Byte At K + 1 Overlay
| + | |
| − | Dim M7 As Byte At Checksumme Overlay
| + | |
| − | Dim M8 As Byte At Ende Overlay
| + | |
| − | | + | |
| − | 'Variablen für die Telegramme an die Motorregler
| + | |
| − | Dim Checksum_rechts As Byte
| + | |
| − | Dim Checksum_links As Byte
| + | |
| − | Dim Richtung_rechts As Byte
| + | |
| − | Dim Richtung_links As Byte
| + | |
| − | Dim Pwm_rechts As Byte
| + | |
| − | Dim Pwm_links As Byte
| + | |
| − | Dim Zeiger_meldung As Byte
| + | |
| − | Dim Ta As Byte 'Interruptdauer. Wenn lang, dann ist der Zählwert nahe 255
| + | |
| − | Dim U_links As Integer 'Motorspannung linker Motor
| + | |
| − | Dim U_rechts As Integer 'Motorspannung rechter Motor
| + | |
| − | Dim I_links As Integer 'Motorstrom linker Motor
| + | |
| − | Dim I_rechts As Integer 'Motorstrom rechter Motor
| + | |
| − | Dim K_links As Integer 'Anzahl Kommutierungen linker Motor
| + | |
| − | Dim K_rechts As Integer 'Anzahl Kommutierungen rechter Motor
| + | |
| − | Dim B(5) As Byte
| + | |
| − | | + | |
| − | Dim Kilometer As Word
| + | |
| − | Dim Kilometermeldung(2) As Byte At Kilometer Overlay
| + | |
| − | | + | |
| − | Dim Akkustand As Integer
| + | |
| − | Dim Akkumeldung(2) As Byte At Akkustand Overlay
| + | |
| − | | + | |
| − | Dim Kmh As Integer
| + | |
| − | Dim Kmhmeldung(2) As Byte At Kmh Overlay
| + | |
| − | | + | |
| − | Dim Meter As Integer
| + | |
| − | Dim Metermeldung(2) As Byte At Meter Overlay
| + | |
| − | | + | |
| − | Dim Di As Single 'Distanz pro Kommutieren
| + | |
| − | Dim Kmhfaktor As Single
| + | |
| − | Dim Zentimeter As Single
| + | |
| − | Dim Strecke As Single 'Gefahrene Strecke während 1/100s
| + | |
| − | Dim Kx As Single 'Anzahl Kommutierungen für Streckenberechnung
| + | |
| − | Dim Kv As Single 'Anzahl Kommutierungen für Geschw.Berechnung
| + | |
| − | Dim Vbrems As Long 'Bremse bei Überlast oder zu hoher Geschw.
| + | |
| − | Dim Lbrems As Long
| + | |
| − | Dim Brems As Long
| + | |
| − | | + | |
| − | Dim P_faktor As Single
| + | |
| − | Dim Pf1 As Byte At P_faktor + 0 Overlay
| + | |
| − | Dim Pf2 As Byte At P_faktor + 1 Overlay
| + | |
| − | Dim Pf3 As Byte At P_faktor + 2 Overlay
| + | |
| − | Dim Pf4 As Byte At P_faktor + 3 Overlay
| + | |
| − | | + | |
| − | Dim I_faktor As Single
| + | |
| − | Dim If1 As Byte At I_faktor + 0 Overlay
| + | |
| − | Dim If2 As Byte At I_faktor + 1 Overlay
| + | |
| − | Dim If3 As Byte At I_faktor + 2 Overlay
| + | |
| − | Dim If4 As Byte At I_faktor + 3 Overlay
| + | |
| − | | + | |
| − | Dim D_faktor As Single
| + | |
| − | Dim Df1 As Byte At D_faktor + 0 Overlay
| + | |
| − | Dim Df2 As Byte At D_faktor + 1 Overlay
| + | |
| − | Dim Df3 As Byte At D_faktor + 2 Overlay
| + | |
| − | Dim Df4 As Byte At D_faktor + 3 Overlay
| + | |
| − | | + | |
| − | Dim Gyro_nick As Integer 'war word
| + | |
| − | Dim Gyro_nick1 As Byte At Gyro_nick + 0 Overlay
| + | |
| − | Dim Gyro_nick2 As Byte At Gyro_nick + 1 Overlay
| + | |
| − | | + | |
| − | Dim Gyro_roll As Integer 'war word
| + | |
| − | Dim Gyro_roll1 As Byte At Gyro_roll + 0 Overlay
| + | |
| − | Dim Gyro_roll2 As Byte At Gyro_roll + 1 Overlay
| + | |
| − | | + | |
| − | Dim Gyro_gier As Integer 'war word
| + | |
| − | Dim Gyro_gier1 As Byte At Gyro_gier + 0 Overlay
| + | |
| − | Dim Gyro_gier2 As Byte At Gyro_gier + 1 Overlay
| + | |
| − | | + | |
| − | Dim Gyro_roll_alt As Integer 'war word
| + | |
| − | Dim Gyro_nick_alt As Integer 'war word
| + | |
| − | | + | |
| − | Dim Acc_nick As Long
| + | |
| − | Dim Acc_nick1 As Byte At Acc_nick + 0 Overlay
| + | |
| − | Dim Acc_nick2 As Byte At Acc_nick + 1 Overlay
| + | |
| − | | + | |
| − | Dim Accnick As Integer
| + | |
| − | Dim Accnick_l As Byte At Accnick + 0 Overlay
| + | |
| − | Dim Accnick_h As Byte At Accnick + 1 Overlay
| + | |
| − | | + | |
| − | Dim Acc_roll As Long
| + | |
| − | Dim Acc_roll1 As Byte At Acc_roll + 0 Overlay
| + | |
| − | Dim Acc_roll2 As Byte At Acc_roll + 1 Overlay
| + | |
| − | | + | |
| − | Dim Accroll As Integer
| + | |
| − | Dim Accroll_l As Byte At Accroll + 0 Overlay
| + | |
| − | Dim Accroll_h As Byte At Accroll + 1 Overlay
| + | |
| − | | + | |
| − | Dim Acc_gier As Long
| + | |
| − | Dim Acc_gier1 As Byte At Acc_gier + 0 Overlay
| + | |
| − | Dim Acc_gier2 As Byte At Acc_gier + 1 Overlay
| + | |
| − | | + | |
| − | Dim Accgier As Integer
| + | |
| − | Dim Accgier_l As Byte At Accgier + 0 Overlay
| + | |
| − | Dim Accgier_h As Byte At Accgier + 1 Overlay
| + | |
| − | | + | |
| − | Dim Sum_acc_roll As Long
| + | |
| − | Dim Sum_acc_nick As Long
| + | |
| − | Dim Sum_gyro_roll As Long
| + | |
| − | Dim Sum_gyro_nick As Long
| + | |
| − | Dim Korr_acc_roll As Long
| + | |
| − | Dim Korr_acc_nick As Long
| + | |
| − | | + | |
| − | 'Long ==> Long Integer
| + | |
| − | Dim Mit_acc_nick_s As Long 'Summierter Neigung vorwärts Mittelwert
| + | |
| − | Dim Mit_gyro_roll As Long
| + | |
| − | Dim Mit_gyro_nick As Long
| + | |
| − | Dim Sig_gyro_roll As Long
| + | |
| − | Dim Sig_gyro_nick As Long
| + | |
| − | | + | |
| − | Dim Stellwert As Single
| + | |
| − | Dim Stellwert1 As Byte At Stellwert + 0 Overlay
| + | |
| − | Dim Stellwert2 As Byte At Stellwert + 1 Overlay
| + | |
| − | Dim Stellwert3 As Byte At Stellwert + 2 Overlay
| + | |
| − | Dim Stellwert4 As Byte At Stellwert + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mrg As Single
| + | |
| − | Dim Mrg1 As Byte At Mrg + 0 Overlay
| + | |
| − | Dim Mrg2 As Byte At Mrg + 1 Overlay
| + | |
| − | Dim Mrg3 As Byte At Mrg + 2 Overlay
| + | |
| − | Dim Mrg4 As Byte At Mrg + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mra As Single
| + | |
| − | Dim Mra1 As Byte At Mra + 0 Overlay
| + | |
| − | Dim Mra2 As Byte At Mra + 1 Overlay
| + | |
| − | Dim Mra3 As Byte At Mra + 2 Overlay
| + | |
| − | Dim Mra4 As Byte At Mra + 3 Overlay
| + | |
| − | | + | |
| − | Dim Kksum As Single
| + | |
| − | Dim Kksum1 As Byte At Kksum + 0 Overlay
| + | |
| − | Dim Kksum2 As Byte At Kksum + 1 Overlay
| + | |
| − | Dim Kksum3 As Byte At Kksum + 2 Overlay
| + | |
| − | Dim Kksum4 As Byte At Kksum + 3 Overlay
| + | |
| − | | + | |
| − | Dim Gyronick As Long
| + | |
| − | Dim Gyronick1 As Byte At Gyronick + 0 Overlay
| + | |
| − | Dim Gyronick2 As Byte At Gyronick + 1 Overlay
| + | |
| − | Dim Gyronick3 As Byte At Gyronick + 2 Overlay
| + | |
| − | Dim Gyronick4 As Byte At Gyronick + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mp_faktor As Single
| + | |
| − | Dim Mpf1 As Byte At Mp_faktor + 0 Overlay
| + | |
| − | Dim Mpf2 As Byte At Mp_faktor + 1 Overlay
| + | |
| − | Dim Mpf3 As Byte At Mp_faktor + 2 Overlay
| + | |
| − | Dim Mpf4 As Byte At Mp_faktor + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mv_faktor As Single
| + | |
| − | Dim Mvf1 As Byte At Mv_faktor + 0 Overlay
| + | |
| − | Dim Mvf2 As Byte At Mv_faktor + 1 Overlay
| + | |
| − | Dim Mvf3 As Byte At Mv_faktor + 2 Overlay
| + | |
| − | Dim Mvf4 As Byte At Mv_faktor + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mpl_faktor As Single
| + | |
| − | Dim Mplf1 As Byte At Mpl_faktor + 0 Overlay
| + | |
| − | Dim Mplf2 As Byte At Mpl_faktor + 1 Overlay
| + | |
| − | Dim Mplf3 As Byte At Mpl_faktor + 2 Overlay
| + | |
| − | Dim Mplf4 As Byte At Mpl_faktor + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mvl_faktor As Single
| + | |
| − | Dim Mvlf1 As Byte At Mvl_faktor + 0 Overlay
| + | |
| − | Dim Mvlf2 As Byte At Mvl_faktor + 1 Overlay
| + | |
| − | Dim Mvlf3 As Byte At Mvl_faktor + 2 Overlay
| + | |
| − | Dim Mvlf4 As Byte At Mvl_faktor + 3 Overlay
| + | |
| − | | + | |
| − | Dim P_tacho As Single
| + | |
| − | Dim Tachomeldung(30) As Byte At P_tacho Overlay
| + | |
| − | Dim T1 As Byte At P_tacho + 0 Overlay
| + | |
| − | Dim T2 As Byte At P_tacho + 1 Overlay
| + | |
| − | Dim T3 As Byte At P_tacho + 2 Overlay
| + | |
| − | Dim T4 As Byte At P_tacho + 3 Overlay
| + | |
| − | | + | |
| − | Dim T5 As Byte At P_tacho + 4 Overlay
| + | |
| − | Dim T6 As Byte At P_tacho + 5 Overlay
| + | |
| − | Dim T7 As Byte At P_tacho + 6 Overlay
| + | |
| − | Dim T8 As Byte At P_tacho + 7 Overlay
| + | |
| − | Dim I_tacho As Single At P_tacho + 4 Overlay
| + | |
| − | | + | |
| − | Dim T9 As Byte At P_tacho + 8 Overlay
| + | |
| − | Dim T10 As Byte At P_tacho + 9 Overlay
| + | |
| − | Dim T11 As Byte At P_tacho + 10 Overlay
| + | |
| − | Dim T12 As Byte At P_tacho + 11 Overlay
| + | |
| − | Dim D_tacho As Single At P_tacho + 8 Overlay
| + | |
| − | | + | |
| − | Dim T13 As Byte At P_tacho + 12 Overlay
| + | |
| − | Dim T14 As Byte At P_tacho + 13 Overlay
| + | |
| − | Dim T15 As Byte At P_tacho + 14 Overlay
| + | |
| − | Dim T16 As Byte At P_tacho + 15 Overlay
| + | |
| − | Dim Mp_tacho As Single At P_tacho + 12 Overlay
| + | |
| − | | + | |
| − | Dim T17 As Byte At P_tacho + 16 Overlay
| + | |
| − | Dim T18 As Byte At P_tacho + 17 Overlay
| + | |
| − | Dim T19 As Byte At P_tacho + 18 Overlay
| + | |
| − | Dim T20 As Byte At P_tacho + 19 Overlay
| + | |
| − | Dim Mv_tacho As Single At P_tacho + 16 Overlay
| + | |
| − | | + | |
| − | Dim T21 As Byte At P_tacho + 20 Overlay
| + | |
| − | Dim T22 As Byte At P_tacho + 21 Overlay
| + | |
| − | Dim T23 As Byte At P_tacho + 22 Overlay
| + | |
| − | Dim T24 As Byte At P_tacho + 23 Overlay
| + | |
| − | Dim Mpl_tacho As Single At P_tacho + 20 Overlay
| + | |
| − | | + | |
| − | Dim T25 As Byte At P_tacho + 24 Overlay
| + | |
| − | Dim T26 As Byte At P_tacho + 25 Overlay
| + | |
| − | Dim T27 As Byte At P_tacho + 26 Overlay
| + | |
| − | Dim T28 As Byte At P_tacho + 27 Overlay
| + | |
| − | Dim Mvl_tacho As Single At P_tacho + 24 Overlay
| + | |
| − | | + | |
| − | Dim T29 As Byte At P_tacho + 28 Overlay
| + | |
| − | Dim T30 As Byte At P_tacho + 29 Overlay
| + | |
| − | Dim Tdummy As Integer At P_tacho + 28 Overlay
| + | |
| − | | + | |
| − | Dim Wwert As Word
| + | |
| − | Dim Wwert1 As Byte At Wwert + 0 Overlay
| + | |
| − | Dim Wwert2 As Byte At Wwert + 1 Overlay
| + | |
| − | | + | |
| − | Dim Gyro_gier_alt As Integer 'war word
| + | |
| − | Dim Sum_gyro_gier As Long
| + | |
| − | Dim Mit_gyro_gier As Long
| + | |
| − | Dim Sig_gyro_gier As Long
| + | |
| − | | + | |
| − | Dim Werteneu As Byte
| + | |
| − | | + | |
| − | Dim Mit_acc_roll As Long 'Neigungsmittelwert seitwärts
| + | |
| − | Dim Mit_acc_roll1 As Byte At Mit_acc_roll + 0 Overlay
| + | |
| − | Dim Mit_acc_roll2 As Byte At Mit_acc_roll + 1 Overlay
| + | |
| − | Dim Mit_acc_roll3 As Byte At Mit_acc_roll + 2 Overlay
| + | |
| − | Dim Mit_acc_roll4 As Byte At Mit_acc_roll + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mit_acc_nick As Long 'Neigungsmittelwert vorwärts
| + | |
| − | Dim Mit_acc_nick1 As Byte At Mit_acc_nick + 0 Overlay
| + | |
| − | Dim Mit_acc_nick2 As Byte At Mit_acc_nick + 1 Overlay
| + | |
| − | Dim Mit_acc_nick3 As Byte At Mit_acc_nick + 2 Overlay
| + | |
| − | Dim Mit_acc_nick4 As Byte At Mit_acc_nick + 3 Overlay
| + | |
| − | | + | |
| − | Dim Null_roll As Long
| + | |
| − | Dim Null_roll1 As Byte At Null_roll + 0 Overlay
| + | |
| − | Dim Null_roll2 As Byte At Null_roll + 1 Overlay
| + | |
| − | Dim Null_roll3 As Byte At Null_roll + 2 Overlay
| + | |
| − | Dim Null_roll4 As Byte At Null_roll + 3 Overlay
| + | |
| − | | + | |
| − | Dim Null_nick As Long
| + | |
| − | Dim Null_nick1 As Byte At Null_nick + 0 Overlay
| + | |
| − | Dim Null_nick2 As Byte At Null_nick + 1 Overlay
| + | |
| − | Dim Null_nick3 As Byte At Null_nick + 2 Overlay
| + | |
| − | Dim Null_nick4 As Byte At Null_nick + 3 Overlay
| + | |
| − | | + | |
| − | Dim Mit_regelzeit_ges As Single
| + | |
| − | | + | |
| − | Dim Lagefehler As Long
| + | |
| − | 'Die Zeit in 1/100s die benötigt wird bis die Nullage erreicht ist
| + | |
| − | Dim Regelzeit As Word
| + | |
| − | Dim Regelzeitmax As Word
| + | |
| − | Dim Mit_acc_roll_max As Long
| + | |
| − | Dim Mit_acc_nick_max As Long
| + | |
| − | Dim Mit_acc_roll_min As Long
| + | |
| − | Dim Mit_acc_nick_min As Long
| + | |
| − | | + | |
| − | Dim Pwm_gesamt As Single
| + | |
| − | Dim Pwm_rechts_max As Byte
| + | |
| − | Dim Pwm_links_max As Byte
| + | |
| − | Dim Intcount As Byte
| + | |
| − | Dim K_diff As Single
| + | |
| − | Dim K_sum As Single
| + | |
| − | Dim K_diff_min As Single
| + | |
| − | Dim K_diff_max As Single
| + | |
| − | Dim Pwm_lenk_rechts As Integer
| + | |
| − | Dim Pwm_lenk_links As Integer
| + | |
| − | | + | |
| − | Dim Lenkvorgabe As Single
| + | |
| − | Dim Mp_anpassung As Single
| + | |
| − | Dim Mv_anpassung As Single
| + | |
| − | Dim Mpl_anpassung As Single
| + | |
| − | Dim Mvl_anpassung As Single
| + | |
| − | Dim K_sum_anpassung As Single
| + | |
| − | | + | |
| − | Dim Wdummy1 As Word
| + | |
| − | Dim Ldummyi As Long
| + | |
| − | Dim Ldummy1 As Long
| + | |
| − | Dim Ldummy2 As Long
| + | |
| − | Dim Bdummy1 As Byte
| + | |
| − | Dim Idummy1 As Integer
| + | |
| − | Dim Sdummy1 As Single
| + | |
| − | | + | |
| − | Dim Antriebaus As Byte
| + | |
| − | Dim Notaus As Byte
| + | |
| − | Dim Sensor_ok As Byte 'Zeigt an ob die Mittelwerte der Gyros stabil stehen
| + | |
| − | Dim Sensor_ok_count As Byte
| + | |
| − | Dim Ltest As Byte
| + | |
| − | | + | |
| − | Dim Imin As Long 'Kleinster gemessener Motorstrom (größte Rückspeisung)
| + | |
| − | Dim Imax As Long 'größter gemessener Motorstrom
| + | |
| − | Dim Summe_as_entladen As Long
| + | |
| − | Dim Summe_mah_entladen As Long
| + | |
| − | Dim Summe_as_laden As Long
| + | |
| − | Dim Summe_mah_laden As Long
| + | |
| − | Dim Akkukap As Long 'Akkukapazität 0...100 %
| + | |
| − | Dim Akku1 As Long '80% Grenze
| + | |
| − | Dim Akku2 As Long '60% Grenze
| + | |
| − | Dim Akku3 As Long '40% Grenze
| + | |
| − | Dim Akku4 As Long '20% Grenze
| + | |
| − | Dim Akku5 As Long '0% Grenze
| + | |
| − | Dim Erzeugt As Long 'Erzeugte Ladung in mA-Stunden
| + | |
| − | Dim Verbraucht As Long 'Verbrauchte Ladung in mA-Stunden
| + | |
| − | | + | |
| − | 'Single Variablen um die Prozente rechnen zu können
| + | |
| − | Dim Akkuinhalt As Single 'wie AkkuKap
| + | |
| − | Dim Akkuverbrauch As Single
| + | |
| − | Dim Akkuprozent As Single
| + | |
| − | | + | |
| − | Dim Bzeit As Long 'Beruhigungszeit von Gyro und Accelerometer
| + | |
| − | Dim Bstate As Byte 'Status der Beruhigungszeit von Gyro und Accelerometer
| + | |
| − | Dim Frei As Byte 'hat es etwas mit Gyro und Acc zu tun?
| + | |
| − | Dim Timeout As Byte
| + | |
| − | Dim S_err As Byte 'Serielle Schnittstellen Error
| + | |
| − | Dim Seriell_err_links As Word 'COM error links
| + | |
| − | Dim Seriell_err_rechts As Word 'COM error rechts
| + | |
| − | Dim Tamax As Byte 'Maximalwert von Ta
| + | |
| − | Dim Fusscount As Word 'Fusschalter nicht betätigt ==> zeitverzögerung
| + | |
| − | Dim Blinkcount As Byte 'verschiedene Blinkraten
| + | |
| − | Dim Lenkerstellung As Single
| + | |
| − | Dim Lenkstellwert As Single
| + | |
| − | Dim Lenkfehler As Single
| + | |
| − | | + | |
| − | 'Texte für den Unfalldatenschreiber (als Text im eeprom)
| + | |
| − | Dim Utext As String * 32
| + | |
| − | | + | |
| − | Dim Ugrund As String * 32 'Auslösegrund
| + | |
| − | Dim Text As String * 16 'Allg. Ttext
| + | |
| − | Dim Min_v As Integer 'Minimalwert der Geschwindigkeit
| + | |
| − | Dim Max_v As Integer 'Maximalwert der Geschwindigkeit
| + | |
| − | | + | |
| − | Dim Tachocount As Byte 'Schleifenzähler um Werte an Display zu schicken
| + | |
| − | Dim Fussschalter As Byte 'Die beiden Fussschalter
| + | |
| − | Dim Adc0 As Word 'Analogwert Fussschalter 1
| + | |
| − | Dim Adc1 As Word 'Analogwert Fussschalter 2
| + | |
| − | | + | |
| − | Dim Slaveadress As Byte 'Adress of the I2C slave to read or write
| + | |
| − | Dim Subadress As Byte 'the I2C register to read or write
| + | |
| − | Dim Databyte As Byte 'I2C Byte to read or write
| + | |
| − | | + | |
| − | Dim Resetbtndone As Byte
| + | |
| − | | + | |
| − | Dim Nummotors As Byte '1 oder 2
| + | |
| − | Dim Errorword As Word 'See Delphi Dashboard.prj
| + | |
| − | Dim Errorword1 As Byte At Errorword + 0 Overlay
| + | |
| − | Dim Errorword2 As Byte At Errorword + 1 Overlay
| + | |
| − | | + | |
| − | Led1 = 0
| + | |
| − | Led2 = 0
| + | |
| − | | + | |
| − | Led3 = 1
| + | |
| − | Led4 = 1
| + | |
| − | Led5 = 1
| + | |
| − | Led6 = 1
| + | |
| − | Led7 = 1
| + | |
| − | | + | |
| − | '***************** Check! *********************
| + | |
| − | Nummotors = 1
| + | |
| − | '***************** Check! *********************
| + | |
| − | | + | |
| − | 'Ein paar feste Werte vorab berechnen:
| + | |
| − | Di = Radumpfang / Kom_pro_u
| + | |
| − | 'Eigentlich 3.6 aber bei der Mittelwertbildung entsteht der 4-Fache Wert,
| + | |
| − | 'darum 9, und es ergibt sich automateisch V in 0.1km/h
| + | |
| − | 'Unbenutzte Pins auf Masse legen
| + | |
| − | Kmhfaktor = Di * 9
| + | |
| − | | + | |
| − | 'Sensorboard Schalten
| + | |
| − | 'Sensor_aus = 0
| + | |
| − | 'Sensor_test = 0
| + | |
| − | | + | |
| − | Config Adc = Single , Prescaler = Auto , Reference = Internal_2.56 'Avcc
| + | |
| − | 'Start Adc not required because ADC will start immediately after Config ADC
| + | |
| − | | + | |
| − | 'Inititialise I2C-Bus
| + | |
| − | I2cinit
| + | |
| − | Config Twi = 200000 ' wanted clock frequency in Hertz
| + | |
| − | 'will set TWBR and TWSR
| + | |
| − | 'Twbr = 12 'bit rate register
| + | |
| − | 'Twsr = 0 'pre scaler bits
| + | |
| − | | + | |
| − | 'TWI gleich einschalten, das macht Bascom ansonsten erst beim I2CStart !
| + | |
| − | Twcr = &B00000100
| + | |
| − | | + | |
| − | Gosub Init_gyro
| + | |
| − | Gosub Init_acc
| + | |
| − | | + | |
| − | 'Wartezeit bis die Motorregler soweit sind
| + | |
| − | Readeeprom Max_v , $2f0
| + | |
| − | Readeeprom Min_v , $2f2
| + | |
| − | Readeeprom Summe_as_entladen , $300 'Entnommene Wh und Ws aus EEPROM lesen
| + | |
| − | Led3 = 0
| + | |
| − | Waitms 150
| + | |
| − | Readeeprom Summe_mah_entladen , $310
| + | |
| − | Led4 = 0
| + | |
| − | Waitms 150
| + | |
| − | Readeeprom Summe_as_laden , $320
| + | |
| − | Led5 = 0
| + | |
| − | Waitms 150
| + | |
| − | Readeeprom Summe_mah_laden , $330
| + | |
| − | Led6 = 0
| + | |
| − | Waitms 150
| + | |
| − | Readeeprom Akkukap , $340
| + | |
| − | Led7 = 0
| + | |
| − | Waitms 150
| + | |
| − | Readeeprom Kilometer , $350
| + | |
| − | Readeeprom Meter , $360
| + | |
| − | Readeeprom Zentimeter , $370
| + | |
| − | | + | |
| − | '<Faktoren für den PID-Regler einlesen>
| + | |
| − | P_faktor = 0.0033 'Readeeprom P_faktor , $380
| + | |
| − | I_faktor = 0.00006 'Readeeprom I_faktor , $384
| + | |
| − | D_faktor = 0.08 'Readeeprom D_faktor , $388
| + | |
| − | Mp_faktor = 0.006 'Readeeprom Mp_faktor , $38c
| + | |
| − | Mv_faktor = 0 'Readeeprom Mv_faktor , $390
| + | |
| − | Mpl_faktor = 0 'Readeeprom Mpl_faktor , $394
| + | |
| − | Mvl_faktor = 0 'Readeeprom Mvl_faktor , $398
| + | |
| − | | + | |
| − | 'Sinnvolle Werte vorbelegen
| + | |
| − | If P_faktor < 0 Or P_faktor > 1 Then P_faktor = 0.0033
| + | |
| − | If I_faktor < 0 Or I_faktor > 1 Then I_faktor = 0.00006
| + | |
| − | If D_faktor < 0 Or D_faktor > 1 Then D_faktor = 0.08
| + | |
| − | If Mp_faktor < 0 Or Mp_faktor > 1 Then Mp_faktor = 0.006
| + | |
| − | | + | |
| − | If Mv_faktor < 0 Or Mv_faktor > 1 Then Mv_faktor = 0
| + | |
| − | If Mpl_faktor < 0 Or Mpl_faktor > 1 Then Mpl_faktor = 0
| + | |
| − | If Mvl_faktor < 0 Or Mvl_faktor > 1 Then Mvl_faktor = 0
| + | |
| − | | + | |
| − | '</Faktoren für den PID-Regler einlesen>
| + | |
| − | If Kilometer = $ffff Then 'Kommt bei frischem EEPROM vor
| + | |
| − | Zentimeter = 0
| + | |
| − | Meter = 0
| + | |
| − | Kilometer = 0
| + | |
| − | Min_v = 0
| + | |
| − | Max_v = 0
| + | |
| − | End If
| + | |
| − | 'Bei Fehlerhaften Werten aus dem EEPROM einfach 10000mAh als Vorgabe
| + | |
| − | If Akkukap <= 0 Then Akkukap = 10000
| + | |
| − | | + | |
| − | #if Systemvoltage = 14 'Nur zum Test mit Netzteil
| + | |
| − | If Akkukap > 32000 Then Akkukap = 100
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 24
| + | |
| − | If Akkukap > 32000 Then Akkukap = 100
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 36
| + | |
| − | If Akkukap > 32000 Then Akkukap = 100
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 48
| + | |
| − | If Akkukap > 32000 Then Akkukap = 100
| + | |
| − | #endif
| + | |
| − | | + | |
| − | Call Akkugrenzen
| + | |
| − | Fusscount = 0
| + | |
| − | Notaus = 0
| + | |
| − | Readeeprom Max_v , $2f0
| + | |
| − | Readeeprom Min_v , $2f4
| + | |
| − | Config Watchdog = 128 'mSec
| + | |
| − | | + | |
| − | 'Maximalwerte für Datenschreiber/Notauserkennung auf 0 setzen
| + | |
| − | Regelzeit = 0
| + | |
| − | Regelzeitmax = 0
| + | |
| − | Mit_acc_nick_max = 0
| + | |
| − | Mit_acc_roll_max = 0
| + | |
| − | Pwm_rechts_max = 0
| + | |
| − | Pwm_links_max = 0
| + | |
| − | K_diff_min = 0
| + | |
| − | K_diff_max = 0
| + | |
| − | Richtung_links = 2 'Leerlauf
| + | |
| − | Richtung_rechts = 2 'Leerlauf
| + | |
| − | Pwm_links = 0
| + | |
| − | Pwm_rechts = 0
| + | |
| − | Pwm_gesamt = 0
| + | |
| − | Mit_acc_nick_s = 0
| + | |
| − | Lenkerstellung = 0
| + | |
| − | | + | |
| − | K_rechts = 0
| + | |
| − | K_links = 0
| + | |
| − | Seriell_err_links = 0
| + | |
| − | Seriell_err_rechts = 0
| + | |
| − | 'Vrbelegen um zu sehen ob es einen Notaus ohne Grund gibt
| + | |
| − | Ugrund = "----------------"
| + | |
| − | | + | |
| − | Disable Interrupts
| + | |
| − | | + | |
| − | 'Timer wird vorgeladen um die gewünschte Zykluszeit nach
| + | |
| − | 'Timerüberlauf zu erreichen
| + | |
| − | 'Nachteil: Timer Count ist nicht exakt gleich der Zykluszeit
| + | |
| − | On Timer0 Regel_interrupt
| + | |
| − | Config Timer0 = Timer , Prescale = 1024 ' (1/20MHz) * 1024 = 51,2uS pro Tick
| + | |
| − | Enable Timer0
| + | |
| − | | + | |
| − | Antriebaus = 1 'Beim Start ist immer alles aus
| + | |
| − | Enable Interrupts
| + | |
| − | Waitms 100
| + | |
| − | | + | |
| − | '< Sicherheitstest. CPU will Reset if one of these conditions are met
| + | |
| − | Start Watchdog 'nach 128mS wird CPU Reset ausgelöst
| + | |
| − | If Resetbtn = 0 Then Wait 10
| + | |
| − | If Antriebaus = 0 Then Wait 10
| + | |
| − | 'If Ugemessen < 1000 Then Wait 10 '10V
| + | |
| − | 'If Ugemessen > 5500 Then Wait 10 '55V
| + | |
| − | Stop Watchdog
| + | |
| − | '< Sicherheitstest
| + | |
| − | | + | |
| − | 'Prüfung ob Akku gerade geladen:
| + | |
| − | #if Systemvoltage = 14
| + | |
| − | 'Sensoren ausschalten wenn am Ladegerät oder zu Testzwecken
| + | |
| − | 'If Ugemessen < 2200 Then
| + | |
| − | ' Sensor_aus = 1
| + | |
| − | 'Else
| + | |
| − | ' Sensor_aus = 0
| + | |
| − | 'End If
| + | |
| − | Errorword.0 = 1
| + | |
| − | | + | |
| − | While Ugemessen < 1100 'Unterspannung oder am Ladegerät
| + | |
| − | Call Flashled(0 , 50)
| + | |
| − | Wend
| + | |
| − | If Ugemessen > 1520 Then 'Akku ist ganzgeladen
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 24
| + | |
| − | 'Sensoren ausschalten wenn am Ladegerät oder zu Testzwecken
| + | |
| − | 'If Ugemessen < 2200 Then
| + | |
| − | ' Sensor_aus = 1
| + | |
| − | 'Else
| + | |
| − | ' Sensor_aus = 0
| + | |
| − | 'End If
| + | |
| − | Errorword.1 = 1
| + | |
| − | While Ugemessen < 2200 'Unterspannung oder am Ladegerät
| + | |
| − | Call Flashled(0 , 50)
| + | |
| − | Wend
| + | |
| − | If Ugemessen > 2650 Then 'Akku ist ganzgeladen
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 36
| + | |
| − | 'Sensoren ausschalten wenn am Ladegerät oder zu Testzwecken
| + | |
| − | 'If Ugemessen < 3300 Then
| + | |
| − | ' Sensor_aus = 1
| + | |
| − | 'Else
| + | |
| − | ' Sensor_aus = 0
| + | |
| − | 'End If
| + | |
| − | Errorword.2 = 1
| + | |
| − | While Ugemessen < 3300 'Unterspannung oder am Ladegerät
| + | |
| − | Call Flashled(0 , 50)
| + | |
| − | Wend
| + | |
| − | If Ugemessen > 4350 Then 'Akku ist ganzgeladen
| + | |
| − | #endif
| + | |
| − | | + | |
| − | #if Systemvoltage = 48
| + | |
| − | 'Sensoren ausschalten wenn am Ladegerät oder zu Testzwecken
| + | |
| − | 'If Ugemessen < 2400 Then
| + | |
| − | ' Sensor_aus = 1
| + | |
| − | 'Else
| + | |
| − | ' Sensor_aus = 0
| + | |
| − | 'End If
| + | |
| − | Errorword.3 = 1
| + | |
| − | While Ugemessen < 4300 'Unterspannung oder am Ladegerät
| + | |
| − | Call Flashled(0 , 50)
| + | |
| − | Wend
| + | |
| − | If Ugemessen > 5280 Then 'Akku ist ganzgeladen
| + | |
| − | #endif
| + | |
| − | | + | |
| − | 'Interruts abschalten damit die folgenden Zeilen nicht gerade jetzt vom
| + | |
| − | 'Interrupt unterbrochen werden.
| + | |
| − | Disable Interrupts
| + | |
| − | Waitms 50
| + | |
| − | Summe_as_entladen = 0
| + | |
| − | Summe_mah_entladen = 0
| + | |
| − | Summe_as_laden = 0
| + | |
| − | Summe_mah_laden = 0
| + | |
| − | Enable Interrupts
| + | |
| − | End If
| + | |
| − | | + | |
| − | Led3 = 0
| + | |
| − | Led4 = 0
| + | |
| − | Led5 = 0
| + | |
| − | Led6 = 0
| + | |
| − | Led7 = 0
| + | |
| − | | + | |
| − | Goto Jp
| + | |
| − | | + | |
| − | 'Summen_vorbelegen:
| + | |
| − | Do
| + | |
| − | Errorword.4 = 1
| + | |
| − | ' Acc_roll = Acc_roll * 100
| + | |
| − | ' Acc_nick = Acc_nick * 100
| + | |
| − | | + | |
| − | 'Sum_gyro_roll = Gyro_roll * Gyro_anz
| + | |
| − | 'Sum_gyro_nick = Gyro_nick * Gyro_anz
| + | |
| − | 'Sum_gyro_gier = Gyro_gier * Gyro_anz
| + | |
| − | | + | |
| − | Gyro_roll_alt = Gyro_roll
| + | |
| − | Gyro_nick_alt = Gyro_nick
| + | |
| − | Gyro_gier_alt = Gyro_gier
| + | |
| − | | + | |
| − | Mit_gyro_roll = Gyro_roll
| + | |
| − | Mit_gyro_nick = Gyro_nick
| + | |
| − | Mit_gyro_gier = Gyro_gier
| + | |
| − | | + | |
| − | Sum_acc_roll = Acc_roll * Acc_anz
| + | |
| − | Sum_acc_nick = Acc_nick * Acc_anz
| + | |
| − | | + | |
| − | Waitms 200
| + | |
| − | Toggle Led5
| + | |
| − | Toggle Led6
| + | |
| − | Waitms 200
| + | |
| − | Toggle Led5
| + | |
| − | Toggle Led6
| + | |
| − | Loop Until Sig_gyro_nick >= -3 And Sig_gyro_nick <= 3 And Sig_gyro_roll >= -3 And Sig_gyro_roll <= 3 And Sig_gyro_gier >= -3 And Sig_gyro_gier <= 3
| + | |
| − | Errorword.4 = 0
| + | |
| − | | + | |
| − | Jp:
| + | |
| − | | + | |
| − | Call Resetdata 'and Enable Interrupt
| + | |
| − | Resetbtndone = 0
| + | |
| − | | + | |
| − | Do
| + | |
| − | Errorword.5 = 1
| + | |
| − | '<Sicherheitstest Sensoren>
| + | |
| − | If Antriebaus = 1 Then
| + | |
| − | If Intcount <> Ltest Then
| + | |
| − | Ltest = Intcount
| + | |
| − | Sensor_ok = 0
| + | |
| − | If Sensor_ok_count > 0 Then Decr Sensor_ok_count
| + | |
| − | '1. Es darf keine nennenswerte Drehbewegung erkannt werden!
| + | |
| − | | + | |
| − | If Sig_gyro_nick < -3 Then Sensor_ok_count = 50
| + | |
| − | If Sig_gyro_nick > 3 Then Sensor_ok_count = 50
| + | |
| − | If Sig_gyro_roll < -3 Then Sensor_ok_count = 50
| + | |
| − | If Sig_gyro_roll > 3 Then Sensor_ok_count = 50
| + | |
| − | 'Nach mehrfachen Drehungen könnte der Mittelwert etwas
| + | |
| − | 'verschoben sein. Darum hier 12
| + | |
| − | If Sig_gyro_gier < -15 Then Sensor_ok_count = 50
| + | |
| − | If Sig_gyro_gier > 15 Then Sensor_ok_count = 50
| + | |
| − | | + | |
| − | '2. Die Werte dürfen nicht verrauscht sein
| + | |
| − | Ldummy2 = Mit_acc_nick + 500
| + | |
| − | If Acc_nick > Ldummy2 Then Sensor_ok_count = 50
| + | |
| − | Ldummy2 = Mit_acc_nick - 500
| + | |
| − | If Acc_nick < Ldummy2 Then Sensor_ok_count = 50
| + | |
| − | Ldummy2 = Mit_acc_roll + 500
| + | |
| − | If Acc_roll > Ldummy2 Then Sensor_ok_count = 50
| + | |
| − | Ldummy2 = Mit_acc_roll - 500
| + | |
| − | If Acc_roll < Ldummy2 Then Sensor_ok_count = 50
| + | |
| − | | + | |
| − | '3. Die Werte müssen ungefähr in einer legalen Nullage sein.
| + | |
| − | If Null_roll < O_roll_u Then Sensor_ok_count = 50
| + | |
| − | If Null_roll > O_roll_o Then Sensor_ok_count = 50
| + | |
| − | If Null_nick < O_nick_u Then Sensor_ok_count = 50
| + | |
| − | If Null_nick > O_nick_o Then Sensor_ok_count = 50
| + | |
| − | | + | |
| − | 'Bedingungen während 50 Messungen (0.5s) eingehalten
| + | |
| − | If Sensor_ok_count = 0 Then Sensor_ok = 1
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | Sensor_ok = 0
| + | |
| − | End If
| + | |
| − | '</Sicherheitstest Sensoren>
| + | |
| − | | + | |
| − | '<Batterieanzeige>
| + | |
| − | 'alles unter 36V Leerlaufspannung ist LEER
| + | |
| − | If Ugemessen > Akkufastleer Then
| + | |
| − | If Verbraucht > Akkukap Then
| + | |
| − | 'Einfach mal annehmen daß noch mehr als angezeigt im Akku ist
| + | |
| − | Akkukap = Verbraucht + 1
| + | |
| − | Call Akkugrenzen
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Antriebaus = 1 Then
| + | |
| − | Errorword.6 = 1
| + | |
| − | Else
| + | |
| − | Errorword.6 = 0
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Notaus = 1 Then
| + | |
| − | Errorword.7 = 1
| + | |
| − | Else
| + | |
| − | Errorword.7 = 0
| + | |
| − | End If
| + | |
| − | | + | |
| − | 'Blinken wenn Gyros nicht bereit
| + | |
| − | If Antriebaus = 1 Then
| + | |
| − | If Ugemessen > Akkuleer Then
| + | |
| − | If Verbraucht > Akkukap Then
| + | |
| − | 'annehmen dass noch mehr als angezeigt im Akku ist
| + | |
| − | Akkukap = Verbraucht + 20
| + | |
| − | Call Akkugrenzen
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | If Sensor_ok = 1 Then
| + | |
| − | If Verbraucht < Akku1 Then Led7 = 0 Else Led7 = 1
| + | |
| − | If Verbraucht < Akku2 Then Led6 = 0 Else Led6 = 1
| + | |
| − | If Verbraucht < Akku3 Then Led5 = 0 Else Led5 = 1
| + | |
| − | If Verbraucht < Akku4 Then Led4 = 0 Else Led4 = 1
| + | |
| − | If Verbraucht < Akku5 Then Led3 = 0 Else Led3 = 1
| + | |
| − | Else
| + | |
| − | If Frei = 1 Then 'ca. 2 Hz
| + | |
| − | Blinkcount = Intcount
| + | |
| − | If Blinkcount > 50 Then Blinkcount = Blinkcount - 50
| + | |
| − | Else
| + | |
| − | Blinkcount = Intcount / 2
| + | |
| − | End If
| + | |
| − | If Blinkcount > 40 Then 'ca. 1 Hz
| + | |
| − | If Verbraucht < Akku1 Then Led7 = 0 Else Led7 = 1
| + | |
| − | If Verbraucht < Akku2 Then Led6 = 0 Else Led6 = 1
| + | |
| − | If Verbraucht < Akku3 Then Led5 = 0 Else Led5 = 1
| + | |
| − | If Verbraucht < Akku4 Then Led4 = 0 Else Led4 = 1
| + | |
| − | If Verbraucht < Akku5 Then Led3 = 0 Else Led3 = 1
| + | |
| − | Else
| + | |
| − | Led7 = 1
| + | |
| − | Led6 = 1
| + | |
| − | Led5 = 1
| + | |
| − | Led4 = 1
| + | |
| − | Led3 = 1
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | Errorword.6 = 0
| + | |
| − | If Verbraucht < Akku1 Then Led7 = 0 Else Led7 = 1
| + | |
| − | If Verbraucht < Akku2 Then Led6 = 0 Else Led6 = 1
| + | |
| − | If Verbraucht < Akku3 Then Led5 = 0 Else Led5 = 1
| + | |
| − | If Verbraucht < Akku4 Then Led4 = 0 Else Led4 = 1
| + | |
| − | If Verbraucht < Akku5 Then Led3 = 0 Else Led3 = 1
| + | |
| − | End If
| + | |
| − | '</Batterieanzeige>
| + | |
| − | | + | |
| − | '< Maximalwerte Für Betriebsdatenschreiber>
| + | |
| − | If Igemessen < Imin Then Imin = Igemessen 'Nur zur Information
| + | |
| − | If Igemessen > Imax Then Imax = Igemessen 'Nur zur Information
| + | |
| − | If Regelzeit > Regelzeitmax Then Regelzeitmax = Regelzeit
| + | |
| − | If Mit_acc_nick > Mit_acc_nick_max Then Mit_acc_nick_max = Mit_acc_nick
| + | |
| − | If Mit_acc_roll > Mit_acc_roll_max Then Mit_acc_roll_max = Mit_acc_roll
| + | |
| − | If Mit_acc_nick < Mit_acc_nick_min Then Mit_acc_nick_min = Mit_acc_nick
| + | |
| − | If Mit_acc_roll < Mit_acc_roll_min Then Mit_acc_roll_min = Mit_acc_roll
| + | |
| − | If Pwm_links > Pwm_links_max Then Pwm_links_max = Pwm_links
| + | |
| − | If Pwm_rechts > Pwm_rechts_max Then Pwm_rechts_max = Pwm_rechts
| + | |
| − | If K_diff > K_diff_max Then K_diff_max = K_diff
| + | |
| − | If K_diff < K_diff_min Then K_diff_min = K_diff
| + | |
| − | If Ta > Tamax Then Tamax = Ta
| + | |
| − | '</Maximalwerte für Betriebsdatenschreiber>
| + | |
| − | | + | |
| − | 'Debounce macht dasselbe, allerdings stockt der Programmfluss
| + | |
| − | Debounce Resetbtn , 0 , Onresetbtn , Sub
| + | |
| − | | + | |
| − | Goto Skipit
| + | |
| − | | + | |
| − | If Resetbtndone = 0 Then
| + | |
| − | If Resetbtn = 0 Then
| + | |
| − | Resetbtndone = 1
| + | |
| − | Call Onresetbtn
| + | |
| − | Resetbtndone = 2
| + | |
| − | Else
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | If Resetbtndone = 2 Then Resetbtndone = 0
| + | |
| − | End If
| + | |
| − | Skipit:
| + | |
| − | | + | |
| − | If Intcount > 80 Then Led1 = 1 Else Led1 = 0 'Sekundenblinken
| + | |
| − | 'Daran lässt sich leicht erkennen ob noch alles normal läuft.
| + | |
| − | Loop
| + | |
| − | End
| + | |
| − | | + | |
| − | '**********************************************************************
| + | |
| − | 'Ab hier Subroutinen und Interrupts
| + | |
| − | '**********************************************************************
| + | |
| − | Sub Akkugrenzen
| + | |
| − | 'Grenzwerte für die Akku-LEDs berechnen
| + | |
| − | Ldummy1 = Akkukap / 5
| + | |
| − | Akku1 = Ldummy1
| + | |
| − | Akku2 = 2 * Ldummy1
| + | |
| − | Akku3 = 3 * Ldummy1
| + | |
| − | Akku4 = 4 * Ldummy1
| + | |
| − | Akku5 = 5 * Ldummy1
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Sub Unfalldatenschreiber
| + | |
| − | Waitms 10
| + | |
| − | Utext = Str(regelzeit)
| + | |
| − | Utext = "Rz=" + Utext
| + | |
| − | Logtext 0 , Utext
| + | |
| − | Utext = Str(mit_acc_nick_max)
| + | |
| − | Utext = "Nick max=" + Utext
| + | |
| − | Logtext $10 , Utext
| + | |
| − | Utext = Str(mit_acc_nick)
| + | |
| − | Utext = "Nick=" + Utext
| + | |
| − | Logtext $20 , Utext
| + | |
| − | Utext = Str(mit_acc_nick_min)
| + | |
| − | Utext = "Nick min=" + Utext
| + | |
| − | Logtext $30 , Utext
| + | |
| − | Utext = Str(mit_acc_roll_max)
| + | |
| − | Utext = "Roll max=" + Utext
| + | |
| − | Logtext $40 , Utext
| + | |
| − | Utext = Str(mit_acc_roll)
| + | |
| − | Utext = "Roll=" + Utext
| + | |
| − | Logtext $50 , Utext
| + | |
| − | Utext = Str(mit_acc_roll_min)
| + | |
| − | Utext = "Roll min=" + Utext
| + | |
| − | Logtext $60 , Utext
| + | |
| − | Utext = Str(pwm_rechts)
| + | |
| − | Utext = "PWM re=" + Utext
| + | |
| − | Logtext $70 , Utext
| + | |
| − | Utext = Str(pwm_links)
| + | |
| − | Utext = "PWM li=" + Utext
| + | |
| − | Logtext $80 , Utext
| + | |
| − | Utext = Str(u_rechts)
| + | |
| − | Utext = "U re=" + Utext
| + | |
| − | Logtext $90 , Utext
| + | |
| − | Utext = Str(u_links)
| + | |
| − | Utext = "U li=" + Utext
| + | |
| − | Logtext $a0 , Utext
| + | |
| − | Utext = Str(ta)
| + | |
| − | Utext = "Ta=" + Utext
| + | |
| − | Logtext $b0 , Utext
| + | |
| − | Utext = Str(seriell_err_links)
| + | |
| − | Utext = Utext + "|"
| + | |
| − | Utext = Utext + Str(seriell_err_rechts)
| + | |
| − | Utext = "S =" + Utext
| + | |
| − | Logtext $c0 , Utext
| + | |
| − | Utext = Ugrund
| + | |
| − | Logtext $d0 , Utext
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Sub Betriebsdatenschreiber
| + | |
| − | 'Ob die Wartezeiten beim EEprom schreiben nötig sind ist nicht sicher.
| + | |
| − | 'Mit den Wartezeiten treten aber keine Fehler bei den Werten mehr auf.
| + | |
| − | 'Möglich, daß dies auch durch eine andere Änderung bewirkt wurde.
| + | |
| − | Writeeeprom Max_v , $2f0
| + | |
| − | Writeeeprom Min_v , $2f2
| + | |
| − | Zentimeter = Int(zentimeter) 'Keine Millimeter schreiben
| + | |
| − | Writeeeprom Summe_as_entladen , $300
| + | |
| − | Writeeeprom Summe_mah_entladen , $310
| + | |
| − | Writeeeprom Summe_as_laden , $320
| + | |
| − | Writeeeprom Summe_mah_laden , $330
| + | |
| − | Writeeeprom Akkukap , $340
| + | |
| − | Writeeeprom Kilometer , $350
| + | |
| − | Writeeeprom Meter , $360
| + | |
| − | Writeeeprom Zentimeter , $370
| + | |
| − | If Werteneu = 1 Then 'Nur wenn das Einstellklavier gesteckt ist.
| + | |
| − | Writeeeprom P_faktor , $380
| + | |
| − | Writeeeprom I_faktor , $384
| + | |
| − | Writeeeprom D_faktor , $388
| + | |
| − | Writeeeprom Mp_faktor , $38c
| + | |
| − | Writeeeprom Mv_faktor , $390
| + | |
| − | Writeeeprom Mpl_faktor , $394
| + | |
| − | Writeeeprom Mvl_faktor , $398
| + | |
| − | Werteneu = 0
| + | |
| − | End If
| + | |
| − | | + | |
| − | Utext = Str(pwm_rechts_max)
| + | |
| − | Utext = "PWM r max=" + Utext
| + | |
| − | Logtext $e0 , Utext
| + | |
| − | Utext = Str(pwm_links_max)
| + | |
| − | Utext = "PWM l max=" + Utext
| + | |
| − | Logtext $f0 , Utext
| + | |
| − | Utext = Str(ugemessen)
| + | |
| − | Utext = "U=" + Utext
| + | |
| − | Logtext $100 , Utext
| + | |
| − | Utext = Str(imin)
| + | |
| − | Utext = "Imin=" + Utext
| + | |
| − | Logtext $110 , Utext
| + | |
| − | Utext = Str(imax)
| + | |
| − | Utext = "Imax=" + Utext
| + | |
| − | Logtext $120 , Utext
| + | |
| − | Utext = Str(summe_mah_entladen)
| + | |
| − | Utext = "-mAh" + Utext
| + | |
| − | Logtext $130 , Utext
| + | |
| − | Utext = Str(summe_mah_laden)
| + | |
| − | Utext = "+mAh=" + Utext
| + | |
| − | Logtext $140 , Utext
| + | |
| − | Utext = Str(verbraucht)
| + | |
| − | Utext = " =" + Utext
| + | |
| − | Logtext $150 , Utext
| + | |
| − | Utext = Str(akkukap)
| + | |
| − | Utext = "Kap=" + Utext
| + | |
| − | Logtext $160 , Utext
| + | |
| − | Utext = Str(kilometer)
| + | |
| − | Utext = "Km=" + Utext
| + | |
| − | Logtext $170 , Utext
| + | |
| − | Utext = Str(meter)
| + | |
| − | Utext = "M=" + Utext
| + | |
| − | Logtext $180 , Utext
| + | |
| − | Utext = Str(zentimeter)
| + | |
| − | Utext = "cm=" + Utext
| + | |
| − | Logtext $190 , Utext
| + | |
| − | Utext = Str(regelzeitmax)
| + | |
| − | Utext = "Rz Max=" + Utext
| + | |
| − | Logtext $1a0 , Utext
| + | |
| − | Utext = Str(null_roll)
| + | |
| − | Utext = "Null_R=" + Utext
| + | |
| − | Logtext $1b0 , Utext
| + | |
| − | Utext = Str(null_nick)
| + | |
| − | Utext = "null_N=" + Utext
| + | |
| − | Logtext $1c0 , Utext
| + | |
| − | Utext = Str(p_faktor)
| + | |
| − | Utext = "P=" + Utext
| + | |
| − | Logtext $1d0 , Utext
| + | |
| − | Utext = Str(i_faktor)
| + | |
| − | Utext = "I=" + Utext
| + | |
| − | Logtext $1e0 , Utext
| + | |
| − | Utext = Str(d_faktor)
| + | |
| − | Utext = "D=" + Utext
| + | |
| − | Logtext $1f0 , Utext
| + | |
| − | Utext = Str(mp_faktor)
| + | |
| − | Utext = "M=" + Utext
| + | |
| − | Logtext $200 , Utext
| + | |
| − | Utext = Str(k_diff_min)
| + | |
| − | Utext = "K min=" + Utext
| + | |
| − | Logtext $210 , Utext
| + | |
| − | Utext = Str(k_diff_max)
| + | |
| − | Utext = "K max=" + Utext
| + | |
| − | Logtext $220 , Utext
| + | |
| − | Utext = Str(seriell_err_links)
| + | |
| − | Utext = "S l=" + Utext
| + | |
| − | Logtext $230 , Utext
| + | |
| − | Utext = Str(seriell_err_rechts)
| + | |
| − | Utext = "S r=" + Utext
| + | |
| − | Logtext $240 , Utext
| + | |
| − | Utext = Str(tamax)
| + | |
| − | Utext = "Ta_Max=" + Utext
| + | |
| − | Logtext $250 , Utext
| + | |
| − | Utext = Str(max_v)
| + | |
| − | Utext = "V_Max=" + Utext
| + | |
| − | Logtext $260 , Utext
| + | |
| − | Utext = Str(min_v)
| + | |
| − | Utext = "V_Min=" + Utext
| + | |
| − | Logtext $270 , Utext
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Sub Onresetbtn
| + | |
| − | If Antriebaus = 1 Then
| + | |
| − | 'alles unter 36V Leerlaufspannung ist LEER
| + | |
| − | If Ugemessen > Akkuleer Then
| + | |
| − | If Sensor_ok = 1 Then 'Prüfen ob Gyros noch driften
| + | |
| − | 'Interupts abschalten damit Fusscount nicht gerade jetzt
| + | |
| − | 'decrementiert wird
| + | |
| − | Call Resetdata
| + | |
| − | Else
| + | |
| − | If Null_nick > O_nick_o And Null_nick < O_nick_oo Then
| + | |
| − | If Bzeit = 500 Then
| + | |
| − | Bstate = 1
| + | |
| − | Bzeit = 0
| + | |
| − | Else
| + | |
| − | If Bstate = 1 Then
| + | |
| − | If Bzeit < 50 Then
| + | |
| − | Disable Interrupts
| + | |
| − | Utext = " "
| + | |
| − | Logtext $00 , Utext
| + | |
| − | Logtext $10 , Utext
| + | |
| − | Logtext $20 , Utext
| + | |
| − | Logtext $30 , Utext
| + | |
| − | Logtext $40 , Utext
| + | |
| − | Logtext $50 , Utext
| + | |
| − | Logtext $60 , Utext
| + | |
| − | Logtext $70 , Utext
| + | |
| − | Logtext $80 , Utext
| + | |
| − | Logtext $90 , Utext
| + | |
| − | Logtext $a0 , Utext
| + | |
| − | Logtext $b0 , Utext
| + | |
| − | Logtext $c0 , Utext
| + | |
| − | Logtext $d0 , Utext
| + | |
| − | Logtext $e0 , Utext
| + | |
| − | Logtext $f0 , Utext
| + | |
| − | Logtext $100 , Utext
| + | |
| − | Logtext $110 , Utext
| + | |
| − | Logtext $120 , Utext
| + | |
| − | Logtext $130 , Utext
| + | |
| − | Logtext $140 , Utext
| + | |
| − | Logtext $150 , Utext
| + | |
| − | Logtext $160 , Utext
| + | |
| − | Logtext $170 , Utext
| + | |
| − | Logtext $180 , Utext
| + | |
| − | Logtext $190 , Utext
| + | |
| − | Logtext $1a0 , Utext
| + | |
| − | Logtext $1b0 , Utext
| + | |
| − | Logtext $1c0 , Utext
| + | |
| − | Logtext $1d0 , Utext
| + | |
| − | Logtext $1e0 , Utext
| + | |
| − | Logtext $1f0 , Utext
| + | |
| − | Logtext $200 , Utext
| + | |
| − | Logtext $210 , Utext
| + | |
| − | Logtext $220 , Utext
| + | |
| − | Logtext $230 , Utext
| + | |
| − | Logtext $240 , Utext
| + | |
| − | Logtext $250 , Utext
| + | |
| − | Logtext $260 , Utext
| + | |
| − | Summe_as_entladen = 0
| + | |
| − | Summe_mah_entladen = 0
| + | |
| − | Summe_as_laden = 0
| + | |
| − | Summe_mah_laden = 0
| + | |
| − | Writeeeprom Summe_as_entladen , $300
| + | |
| − | Writeeeprom Summe_mah_entladen , $310
| + | |
| − | Writeeeprom Summe_as_laden , $320
| + | |
| − | Writeeeprom Summe_mah_laden , $330
| + | |
| − | Frei = 0
| + | |
| − | For Bzeit = 1 To 10
| + | |
| − | Led3 = 1
| + | |
| − | Led4 = 1
| + | |
| − | Led5 = 1
| + | |
| − | Led6 = 1
| + | |
| − | Led7 = 1
| + | |
| − | Waitms 100
| + | |
| − | Led3 = 0
| + | |
| − | Led4 = 0
| + | |
| − | Led5 = 0
| + | |
| − | Led6 = 0
| + | |
| − | Led7 = 0
| + | |
| − | Waitms 100
| + | |
| − | Next
| + | |
| − | Bzeit = 500
| + | |
| − | Enable Interrupts
| + | |
| − | Waitms 100
| + | |
| − | End If
| + | |
| − | If Bzeit > 250 And Bzeit < 350 Then
| + | |
| − | Frei = 1
| + | |
| − | Bzeit = 500
| + | |
| − | Else
| + | |
| − | Frei = 0
| + | |
| − | Bzeit = 500
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | Frei = 0
| + | |
| − | Bzeit = 500
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | If Verbraucht < Akkukap Then 'Akku ist laut Spannung leer!
| + | |
| − | 'Einfach mal annehmen daß zuviel entnommen wurde
| + | |
| − | Akkukap = Verbraucht * 0.95
| + | |
| − | Akkugrenzen
| + | |
| − | End If
| + | |
| − | 'Disable Interrupts
| + | |
| − | 'Betriebsdatenschreiber
| + | |
| − | 'Enable Interrupts
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | Antriebaus = 1
| + | |
| − | Waitms 100
| + | |
| − | Frei = 0
| + | |
| − | | + | |
| − | 'Disable Interrupts
| + | |
| − | 'Betriebsdatenschreiber
| + | |
| − | 'Enable Interrupts
| + | |
| − | End If
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Sub Logtext(adresse , Text)
| + | |
| − | If Len(text) > 16 Then Text = Mid(text , 1 , 16)
| + | |
| − | While Len(text) < 16
| + | |
| − | Text = Text + " "
| + | |
| − | Wend
| + | |
| − | Writeeeprom Text , Adresse
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Regel_interrupt:
| + | |
| − | '*****************************************************************************
| + | |
| − | 'Eigentlich ist das kein typischer Interrupt. Der Interrupt wird hier nur
| + | |
| − | 'verwendet um der Regelung einen 100Hz Takt zu geben.
| + | |
| − | 'Andere Timer Interrupts werden für diese Zeit blockiert
| + | |
| − | '*****************************************************************************
| + | |
| − | 'Timer zählt ab diesem Wert aufwärts bis 256 und macht dann einen Interrupt
| + | |
| − | '==> je höher die Startzahl, umso kürzer das Intervall
| + | |
| − | ' 20 MHz / 1024 (Prescaler) = 15,625 KHz / 256 = 61Hz
| + | |
| − | ' (61/100) * 256 = 156
| + | |
| − | ' 256 - 156 = 100 Der Timer selbst braucht auch etwas Zeit, d.h. 100 ist tatsächlich 61
| + | |
| − | Timer0 = 61
| + | |
| − | | + | |
| − | Bdummy1 = Udr
| + | |
| − | | + | |
| − | Gosub Readfussschalter
| + | |
| − | Gosub Read_gyro
| + | |
| − | Gosub Read_acc
| + | |
| − | | + | |
| − | 'Acc_roll = Acc_roll '*100, war früher -512...+512 jetzt -30000...+30000
| + | |
| − | 'Acc_nick = Acc_nick '*100, war früher -512...+512 jetzt -30000...+30000
| + | |
| − | | + | |
| − | '<Mittellage ausgleichen>
| + | |
| − | 'Die Offsetwerte werden langsam an eine früher ermittelte Waagerechte
| + | |
| − | 'Position angeglichen.
| + | |
| − | Null_roll = Null_roll * 99
| + | |
| − | Null_nick = Null_nick * 99
| + | |
| − | Null_roll = Null_roll + Offset_roll 'Mittellage
| + | |
| − | Null_nick = Null_nick + Offset_nick 'Mittellage
| + | |
| − | Null_roll = Null_roll / 100
| + | |
| − | Null_nick = Null_nick / 100
| + | |
| − | '</Mittellage ausgleichen>
| + | |
| − | | + | |
| − | 'Offsetwerte der Beschleunigungssensoren sofort abziehen
| + | |
| − | 'Diese werden nicht laufend ermittelt
| + | |
| − | 'Acc_roll = Acc_roll - Null_roll
| + | |
| − | 'Acc_nick = Acc_nick - Null_nick
| + | |
| − | '<Geschwindikgeitsbegrenzung>
| + | |
| − | 'Bei Der Geschwindigkeitsbegrenzung Wird die Nullage Der Plattform Verändert.
| + | |
| − | 'Beim Vorwärtsbremsen wird nach hinten geneigt, beim Rückwärtsbremsen nach vorne.
| + | |
| − | | + | |
| − | Vbrems = 0
| + | |
| − | Lbrems = 0
| + | |
| − | If Frei = 0 Then
| + | |
| − | If Kmh > Vmax Then Vbrems = Vmax - Kmh
| + | |
| − | If Kmh < Vmaxr Then Vbrems = Vmaxr - Kmh
| + | |
| − | End If
| + | |
| − | | + | |
| − | 'Lastabhängige Bremse
| + | |
| − | 'Es muss immer genug Reserve sein um noch zu Bremsen oder zu Balancieren
| + | |
| − | Ldummyi = Int(pwm_gesamt)
| + | |
| − | If Ldummyi > Spwm Then Lbrems = Spwm - Ldummyi
| + | |
| − | If Ldummyi < Spwmr Then Lbrems = Spwmr - Ldummyi
| + | |
| − | Brems = Lbrems + Vbrems
| + | |
| − | Brems = Brems * 50
| + | |
| − | 'Nicht zu heftig Bremsen
| + | |
| − | If Brems < -2000 Then Brems = -2000
| + | |
| − | If Brems > 2000 Then Brems = 2000
| + | |
| − | Acc_nick = Acc_nick + Brems
| + | |
| − | '</Geschwindikgeitsbegrenzung>
| + | |
| − | | + | |
| − | '<Signalaufbereitung der Sensorsignale>
| + | |
| − | K_diff = K_rechts - K_links
| + | |
| − | K_sum = K_sum * 0.84
| + | |
| − | K_sum = K_sum + K_diff
| + | |
| − | 'Gleitender Mittelwert der Gyros berechnen um damit den Offset bei
| + | |
| − | 'Stillstand zu haben. Dieser ist leider Temperaturabhängig.
| + | |
| − | 'Sum_gyro_gier = Sum_gyro_gier - Mit_gyro_gier
| + | |
| − | 'Sum_gyro_gier = Sum_gyro_gier + Gyro_gier
| + | |
| − | 'Mit_gyro_gier = Sum_gyro_gier / Gyro_anz
| + | |
| − | Sig_gyro_gier = Gyro_gier '- Mit_gyro_gier 'Polarität
| + | |
| − | | + | |
| − | 'Sum_gyro_roll = Sum_gyro_roll - Mit_gyro_roll
| + | |
| − | 'Sum_gyro_roll = Sum_gyro_roll + Gyro_roll
| + | |
| − | 'Mit_gyro_roll = Sum_gyro_roll / Gyro_anz
| + | |
| − | Sig_gyro_roll = Gyro_roll '- Mit_gyro_roll 'Polarität
| + | |
| − | | + | |
| − | 'Korr_acc_roll = Sig_gyro_roll * Gyro_faktor
| + | |
| − | Sum_acc_roll = Sum_acc_roll - Mit_acc_roll
| + | |
| − | Sum_acc_roll = Sum_acc_roll + Acc_roll
| + | |
| − | 'Sum_acc_roll = Sum_acc_roll + Korr_acc_roll 'Gyrowert hinzu
| + | |
| − | 'Mittelwert bilden
| + | |
| − | Mit_acc_roll = Sum_acc_roll / Acc_anz
| + | |
| − | Mit_acc_roll = Sum_acc_roll
| + | |
| − | | + | |
| − | '*************************************************************************
| + | |
| − | 'Das soll ausgleichen, daß die Gyros bei gekippten Sensoren eine Drehung
| + | |
| − | 'um die falsche Achse registrieren.
| + | |
| − | 'Sdummy1 = Mit_acc_roll * Sig_gyro_gier
| + | |
| − | 'Die Sensorplatine muss dazu absolut Waagerecht montiert sein.
| + | |
| − | 'Sdummy1 = Sdummy1 / 20000
| + | |
| − | 'Lagefehler = Int(sdummy1)
| + | |
| − | 'Das soll den Fehler ausgleichen, der durch die geänderte Lage des
| + | |
| − | 'Gyros auftritt.
| + | |
| − | 'Gyro_nick = Gyro_nick + Lagefehler
| + | |
| − | '************************************************************************
| + | |
| − | Sum_gyro_nick = Sum_gyro_nick - Mit_gyro_nick
| + | |
| − | Sum_gyro_nick = Sum_gyro_nick + Gyro_nick
| + | |
| − | Mit_gyro_nick = Sum_gyro_nick / Gyro_anz
| + | |
| − | Sig_gyro_nick = Gyro_nick - Mit_gyro_nick
| + | |
| − | | + | |
| − | 'Gyro = Beschleunigung
| + | |
| − | 'Accelerometer = Neigung
| + | |
| − | | + | |
| − | 'Korr_acc_nick = Sig_gyro_nick * Gyro_faktor
| + | |
| − | Sum_acc_nick = Sum_acc_nick - Mit_acc_nick
| + | |
| − | Sum_acc_nick = Sum_acc_nick + Acc_nick
| + | |
| − | 'Sum_acc_nick = Sum_acc_nick - Korr_acc_nick 'Gyrowert hinzu
| + | |
| − | Mit_acc_nick = Sum_acc_nick / Acc_anz
| + | |
| − | '</Signalaufbereitung der Sensorsignale>
| + | |
| − | | + | |
| − | '<PID-Regler>
| + | |
| − | Stellwert = 0
| + | |
| − | '< P-Anteil>
| + | |
| − | Sdummy1 = Mit_acc_nick
| + | |
| − | Sdummy1 = Sdummy1 * P_faktor
| + | |
| − | Stellwert = Stellwert - Sdummy1
| + | |
| − | | + | |
| − | '<I-Anteil>
| + | |
| − | Mit_acc_nick_s = Mit_acc_nick_s + Mit_acc_nick
| + | |
| − | 'Überlauf/unsinnige Werte verhindern
| + | |
| − | If Mit_acc_nick_s > Max_mit_acc_nick_s Then
| + | |
| − | Mit_acc_nick_s = Max_mit_acc_nick_s
| + | |
| − | End If
| + | |
| − | If Mit_acc_nick_s < Min_mit_acc_nick_s Then
| + | |
| − | Mit_acc_nick_s = Min_mit_acc_nick_s
| + | |
| − | End If
| + | |
| − | Sdummy1 = Mit_acc_nick_s
| + | |
| − | Sdummy1 = Sdummy1 * I_faktor
| + | |
| − | Stellwert = Stellwert - Sdummy1
| + | |
| − | | + | |
| − | '<D-Anteil>
| + | |
| − | Sdummy1 = Sig_gyro_nick
| + | |
| − | Sdummy1 = Sdummy1 * D_faktor
| + | |
| − | 'Stellwert ==> Stromsollwert
| + | |
| − | Stellwert = Stellwert + Sdummy1
| + | |
| − | | + | |
| − | '<Anpassungsfaktoren berechnen>
| + | |
| − | K_sum_anpassung = K_rechts + K_links
| + | |
| − | K_sum_anpassung = Abs(k_sum_anpassung)
| + | |
| − | | + | |
| − | Mp_anpassung = Pwm_gesamt * Mp_faktor
| + | |
| − | Mp_anpassung = Abs(mp_anpassung)
| + | |
| − | Mp_anpassung = Mp_anpassung + 0.95
| + | |
| − | | + | |
| − | Mv_anpassung = K_sum_anpassung * Mv_faktor
| + | |
| − | Mv_anpassung = Abs(mv_anpassung)
| + | |
| − | Mv_anpassung = Mv_anpassung + 1
| + | |
| − | | + | |
| − | Mpl_anpassung = Pwm_gesamt * Mpl_faktor
| + | |
| − | Mpl_anpassung = Abs(mpl_anpassung)
| + | |
| − | Mpl_anpassung = Mpl_anpassung + 1
| + | |
| − | | + | |
| − | Mvl_anpassung = K_sum_anpassung * Mvl_faktor
| + | |
| − | Mvl_anpassung = Abs(mvl_anpassung)
| + | |
| − | Mvl_anpassung = Mvl_anpassung + 1
| + | |
| − | '</Anpassungsfaktoren berechnen>
| + | |
| − | | + | |
| − | '<Verstärkte Regelung bei hoher Leistung>
| + | |
| − | Stellwert = Stellwert * Mp_anpassung
| + | |
| − | Stellwert = Stellwert * Mv_anpassung
| + | |
| − | '<Verstärkte Regelung bei hoher Leistung>
| + | |
| − | | + | |
| − | '<Abgeschwächte Regelung im Stand>
| + | |
| − | If K_sum_anpassung < 8 Then Stellwert = Stellwert * 0.8
| + | |
| − | If K_sum_anpassung < 6 Then Stellwert = Stellwert * 0.8
| + | |
| − | If K_sum_anpassung < 4 Then Stellwert = Stellwert * 0.8
| + | |
| − | | + | |
| − | '</Abgeschwächte Regelung in Stand>
| + | |
| − | Pwm_gesamt = Pwm_gesamt + Stellwert
| + | |
| − | | + | |
| − | '</PID-Regler>
| + | |
| − | | + | |
| − | '<Bremsvibrator einmischen>
| + | |
| − | 'Der Bremsvibrator signalisiert dem Fahrer, daß wegen irgend einem
| + | |
| − | 'Grenzwert gebremst wird. Das kann V-Max oder P-Max sein.
| + | |
| − | If Brems <> 0 Then
| + | |
| − | Bdummy1 = Intcount / 2
| + | |
| − | Bdummy1 = Bdummy1 Mod 2
| + | |
| − | If Bdummy1 = 0 Then
| + | |
| − | Pwm_gesamt = Pwm_gesamt + 5
| + | |
| − | Else
| + | |
| − | Pwm_gesamt = Pwm_gesamt - 5
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | '<Bremsvibrator einmischen>
| + | |
| − | | + | |
| − | '<Lenkung>
| + | |
| − | Lenkvorgabe = Mit_acc_roll / 80
| + | |
| − | | + | |
| − | Sdummy1 = Abs(lenkvorgabe)
| + | |
| − | If Sdummy1 <= 6 Then
| + | |
| − | Sdummy1 = Sdummy1 / 12
| + | |
| − | Lenkerstellung = Lenkvorgabe * Sdummy1
| + | |
| − | Else
| + | |
| − | If Lenkvorgabe < 0 Then
| + | |
| − | Lenkerstellung = Lenkvorgabe + 3
| + | |
| − | Else
| + | |
| − | Lenkerstellung = Lenkvorgabe - 3
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | 'Lenkfehler berechnen und zum Stellwert hinzu.
| + | |
| − | Sdummy1 = Sig_gyro_gier
| + | |
| − | Sdummy1 = Sdummy1 / 5
| + | |
| − | Lenkfehler = Lenkerstellung - Sdummy1
| + | |
| − | Lenkfehler = Lenkfehler * Mpl_anpassung
| + | |
| − | Lenkfehler = Lenkfehler * Mvl_anpassung
| + | |
| − | | + | |
| − | Lenkstellwert = Lenkerstellung + Lenkfehler
| + | |
| − | | + | |
| − | If Lenkstellwert > Max_lenk Then Lenkstellwert = Max_lenk
| + | |
| − | If Lenkstellwert < Min_lenk Then Lenkstellwert = Min_lenk
| + | |
| − | | + | |
| − | Pwm_lenk_links = Pwm_gesamt + Lenkstellwert
| + | |
| − | Pwm_lenk_rechts = Pwm_gesamt - Lenkstellwert
| + | |
| − | | + | |
| − | If Pwm_lenk_links > 0 Then Richtung_links = 1 Else Richtung_links = 0
| + | |
| − | If Pwm_lenk_rechts > 0 Then Richtung_rechts = 1 Else Richtung_rechts = 0
| + | |
| − | | + | |
| − | Pwm_lenk_links = Abs(pwm_lenk_links)
| + | |
| − | Pwm_lenk_rechts = Abs(pwm_lenk_rechts)
| + | |
| − | | + | |
| − | If Pwm_lenk_links > Maxpwm Then Pwm_lenk_links = Maxpwm
| + | |
| − | If Pwm_lenk_rechts > Maxpwm Then Pwm_lenk_rechts = Maxpwm
| + | |
| − | | + | |
| − | If Pwm_lenk_links < Minpwm Then Pwm_lenk_links = Minpwm
| + | |
| − | If Pwm_lenk_rechts < Minpwm Then Pwm_lenk_rechts = Minpwm
| + | |
| − | | + | |
| − | Pwm_links = Pwm_lenk_links
| + | |
| − | Pwm_rechts = Pwm_lenk_rechts
| + | |
| − | '</Lenkung>
| + | |
| − | | + | |
| − | If Antriebaus = 1 Then
| + | |
| − | If Notaus = 1 Then
| + | |
| − | 'Unfalldatenschreiber: *************************************************
| + | |
| − | 'Dauert zwar Lange, macht aber nix. Bei Notaus muss nix geregelt werden.
| + | |
| − | ' call Unfalldatenschreiber
| + | |
| − | ' call Betriebsdatenschreiber
| + | |
| − | Notaus = 0
| + | |
| − | '***********************************************************************
| + | |
| − | End If
| + | |
| − | 'Auf 0 setzen was sonst geregelt wird
| + | |
| − | Richtung_links = 2 'Leerlauf
| + | |
| − | Richtung_rechts = 2 'Leerlauf
| + | |
| − | Pwm_links = 0
| + | |
| − | Pwm_rechts = 0
| + | |
| − | Pwm_gesamt = 0
| + | |
| − | Mit_acc_nick_s = 0
| + | |
| − | Lenkerstellung = 0
| + | |
| − | K_rechts = 0
| + | |
| − | K_links = 0
| + | |
| − | 'Waagerechte Positoion setzen wenn Zustand Antriebaus:
| + | |
| − | Wdummy1 = Acc_roll
| + | |
| − | Null_roll = Wdummy1 * 100
| + | |
| − | Wdummy1 = Acc_nick
| + | |
| − | Null_nick = Wdummy1 * 100
| + | |
| − | 'Mittelwert der Beschleunigungssensoren auf aktuellen Wert stellen
| + | |
| − | 'Der Mittelwert braucht sonst zu lange bis er sich eingeregelt hat
| + | |
| − | Sum_acc_roll = Acc_roll * Acc_anz
| + | |
| − | Sum_acc_nick = Acc_nick * Acc_anz
| + | |
| − | If Intcount = 0 Then T30 = 1 'Regelparameter vom Tacho anfordern
| + | |
| − | If Intcount = 50 Then T30 = 1 'Regelparameter vom Tacho anfordern
| + | |
| − | End If
| + | |
| − | | + | |
| − | '******************************************************************************
| + | |
| − | If T30 = 1 Then 'Regelparameter vom Tacho anfordern
| + | |
| − | K_links = 0
| + | |
| − | K_rechts = 0
| + | |
| − | Zeiger_meldung = 1
| + | |
| − | Bdummy1 = Udr
| + | |
| − | T30 = 0 'Damit keine alte Rückmeldung ausgewertet wird
| + | |
| − | Timeout = Timer0
| + | |
| − | Timeout = Timeout + 100
| + | |
| − | 'Anforderung an Display senden
| + | |
| − | Print Chr(255) ; Chr(0) ; Chr(0) ; Chr(255) ; Chr(13)
| + | |
| − | While Zeiger_meldung < 31
| + | |
| − | If Ucsr0a.rxc0 = 1 Then 'Warten bis ein Byte eingetroffen ist
| + | |
| − | Tachomeldung(zeiger_meldung) = Udr
| + | |
| − | Incr Zeiger_meldung
| + | |
| − | Timeout = Timer0
| + | |
| − | Timeout = Timeout + 20
| + | |
| − | End If
| + | |
| − | If Timer0 > Timeout Then
| + | |
| − | T30 = 0
| + | |
| − | Exit While 'Timeout
| + | |
| − | End If
| + | |
| − | Wend
| + | |
| − | If T30 = 13 Then 'Jetzt BCC berechnen
| + | |
| − | !lds R24,{t1}
| + | |
| − | !LDs R25,{t2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t4}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t5}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t6}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t7}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t8}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t9}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t10}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t11}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t12}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t13}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t14}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t15}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t16}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t17}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t18}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t19}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t20}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t21}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t22}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t23}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t24}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t25}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t26}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t27}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{t28}
| + | |
| − | !add R24,R25
| + | |
| − | !STS {Bdummy1},R24
| + | |
| − | | + | |
| − | If Bdummy1 = T29 Then
| + | |
| − | P_faktor = P_tacho
| + | |
| − | I_faktor = I_tacho
| + | |
| − | D_faktor = D_tacho
| + | |
| − | Mp_faktor = Mp_tacho
| + | |
| − | Mv_faktor = Mv_tacho
| + | |
| − | Mpl_faktor = Mpl_tacho
| + | |
| − | Mvl_faktor = Mvl_tacho
| + | |
| − | Werteneu = 1
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | 'Errechnete Geschwindigkeiten an Motoren Senden:
| + | |
| − | 'Rechter Motor:
| + | |
| − | If Nummotors = 2 Then
| + | |
| − | Checksum_rechts = 82
| + | |
| − | Checksum_rechts = Checksum_rechts + Richtung_rechts
| + | |
| − | Checksum_rechts = Checksum_rechts + Pwm_rechts
| + | |
| − | 'Geschwindigkeit an Motorregler senden
| + | |
| − | Bdummy1 = Udr 'Puffer leeren
| + | |
| − | 'Print Chr(82); Chr(richtung_rechts); Chr(pwm_rechts); Chr(checksum_rechts); Chr(13);
| + | |
| − | 'In Assembler geht das so:
| + | |
| − | !Ldi R24 , 82
| + | |
| − | !STS udr,R24
| + | |
| − | Warten1:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten1
| + | |
| − | !LDS R24,{Richtung_rechts}
| + | |
| − | !STS udr,R24
| + | |
| − | Warten2:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten2
| + | |
| − | !lds R24,{Pwm_rechts} 'PWM Wert
| + | |
| − | !STS udr,R24
| + | |
| − | Warten3:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten3
| + | |
| − | !LDS R24,{Checksum_rechts}
| + | |
| − | !STS udr,R24
| + | |
| − | Warten4:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten4
| + | |
| − | !LDI R24,13
| + | |
| − | !STS udr,R24
| + | |
| − | Warten5:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten5
| + | |
| − | | + | |
| − | Motormeldung(8) = 0 'Damit keine alte Rückmeldung ausgewertet wird
| + | |
| − | | + | |
| − | 'Vom Motorcontroller lesen
| + | |
| − | Timeout = Timer0
| + | |
| − | Zeiger_meldung = 1
| + | |
| − | '80 Ticks * 51,2uS pro Tick = 4mS Wartezeit auf Antwort
| + | |
| − | 'COM benötigt ca. 1,5mS für 9 Byte
| + | |
| − | Errorword.8 = 0
| + | |
| − | Timeout = Timeout + 80
| + | |
| − | While Zeiger_meldung < 9
| + | |
| − | If Ucsr0a.rxc0 = 1 Then 'Warten bis ein Byte eingetroffen ist
| + | |
| − | Motormeldung(zeiger_meldung) = Udr
| + | |
| − | Incr Zeiger_meldung
| + | |
| − | End If
| + | |
| − | If Timer0 > Timeout Then
| + | |
| − | Ende = 0
| + | |
| − | Errorword.8 = 1
| + | |
| − | Exit While 'Timeout
| + | |
| − | End If
| + | |
| − | Wend
| + | |
| − | | + | |
| − | !lds R24,{M1}
| + | |
| − | !LDs R25,{M2}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M3}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M4}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M5}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M6}
| + | |
| − | !ADD R24,R25
| + | |
| − | !STS {Bdummy1},R24
| + | |
| − | | + | |
| − | If Bdummy1 <> Checksumme Then Ende = 0
| + | |
| − | If Ende = 13 Then
| + | |
| − | U_rechts = U
| + | |
| − | I_rechts = I
| + | |
| − | K_rechts = K
| + | |
| − | Else
| + | |
| − | Incr Seriell_err_rechts
| + | |
| − | S_err = 1
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | 'Linker Motor:
| + | |
| − | Checksum_links = 76 'Adresse
| + | |
| − | Checksum_links = Checksum_links + Richtung_links
| + | |
| − | Checksum_links = Checksum_links + Pwm_links
| + | |
| − | Zeiger_meldung = 1
| + | |
| − | Bdummy1 = Udr 'Puffer leeren
| + | |
| − | 'Print Chr(76); Chr(richtung_links); Chr(pwm_links); Chr(checksum_links); Chr(13);
| + | |
| − | '>>>>>>>>>>>> Message an Motorcontroller senden <<<<<<<<<<<<<<
| + | |
| − | 'In Assembler geht das so:
| + | |
| − | !Ldi R24 , 76 'Adresse
| + | |
| − | !STS udr,R24
| + | |
| − | Warten6:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten6
| + | |
| − | !LDS R24,{Richtung_links}
| + | |
| − | !STS udr,R24
| + | |
| − | Warten7:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten7
| + | |
| − | !lds R24,{Pwm_links}
| + | |
| − | !STS udr,R24
| + | |
| − | Warten8:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten8
| + | |
| − | !LDS R24,{Checksum_links}
| + | |
| − | !STS udr,R24
| + | |
| − | Warten9:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten9
| + | |
| − | !LDI R24,13
| + | |
| − | !STS udr,R24
| + | |
| − | Warten10:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten10
| + | |
| − | Motormeldung(8) = 0 'Damit keine alte Rückmeldung ausgewertet wird
| + | |
| − | Timeout = Timer0
| + | |
| − | Timeout = Timeout + 80 'Wartezeit auf Antwort
| + | |
| − | '>>>>>>>>>>>> Message vom Motorcontroller empfangen <<<<<<<<<<<<<<
| + | |
| − | While Zeiger_meldung < 9
| + | |
| − | If Ucsr0a.rxc0 = 1 Then 'Warten bis ein Byte eingetroffen ist
| + | |
| − | Motormeldung(zeiger_meldung) = Udr
| + | |
| − | Incr Zeiger_meldung
| + | |
| − | End If
| + | |
| − | If Timer0 > Timeout Then
| + | |
| − | Ende = 0
| + | |
| − | Errorword.8 = 1
| + | |
| − | Exit While 'Timeout
| + | |
| − | End If
| + | |
| − | Wend
| + | |
| − | | + | |
| − | !lds R24,{M1}
| + | |
| − | !LDs R25,{M2}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M3}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M4}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M5}
| + | |
| − | !ADD R24,R25
| + | |
| − | !LDs R25,{M6}
| + | |
| − | !ADD R24,R25
| + | |
| − | !STS {Bdummy1},R24
| + | |
| − | | + | |
| − | If Bdummy1 <> Checksumme Then Ende = 0
| + | |
| − | If Ende = 13 Then
| + | |
| − | U_links = U
| + | |
| − | I_links = I
| + | |
| − | K_links = K
| + | |
| − | Else
| + | |
| − | Incr Seriell_err_links
| + | |
| − | S_err = 1
| + | |
| − | End If
| + | |
| − | If S_err = 1 Then 'Sicherheitshalber, damit der Lenkausgleich nicht überreagiert.
| + | |
| − | K_links = 0
| + | |
| − | K_rechts = 0
| + | |
| − | S_err = 0
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Antriebaus = 0 Then
| + | |
| − | '<Not-Aus Kriterien ermitteln>
| + | |
| − | If Mit_acc_nick > -300 Then If Mit_acc_nick < 300 Then Regelzeit = 0
| + | |
| − | Incr Regelzeit
| + | |
| − | '</Not-Aus Kriterien ermitteln>
| + | |
| − | | + | |
| − | '<Not-Aus Kriterien abprüfen>
| + | |
| − | If Regelzeit > 250 Then 'Wenn nach 2,5s waagerechte Lage nicht erreicht
| + | |
| − | Notaus = 1
| + | |
| − | Antriebaus = 1
| + | |
| − | Ugrund = Str(regelzeit)
| + | |
| − | Ugrund = "*Rz " + Ugrund
| + | |
| − | End If
| + | |
| − | Ldummyi = 4000 + Brems
| + | |
| − | If Mit_acc_nick > Ldummyi Then 'zu weit nach hinten gekippt
| + | |
| − | Notaus = 1
| + | |
| − | Antriebaus = 1
| + | |
| − | Ugrund = Str(mit_acc_nick)
| + | |
| − | Ugrund = "*Nick " + Ugrund
| + | |
| − | End If
| + | |
| − | Ldummyi = -4000 + Brems
| + | |
| − | If Mit_acc_nick < Ldummyi Then 'zu weit nach vorn gekippt
| + | |
| − | Notaus = 1
| + | |
| − | Antriebaus = 1
| + | |
| − | Ugrund = Str(mit_acc_nick)
| + | |
| − | Ugrund = "*Nick " + Ugrund
| + | |
| − | End If
| + | |
| − | If Mit_acc_roll > 5000 Then 'Lenker zu weit nach rechts
| + | |
| − | Notaus = 1
| + | |
| − | Antriebaus = 1
| + | |
| − | Ugrund = Str(mit_acc_roll)
| + | |
| − | Ugrund = "*Roll " + Ugrund
| + | |
| − | End If
| + | |
| − | If Mit_acc_roll < -5000 Then 'Lenker zu weit nach links
| + | |
| − | Notaus = 1
| + | |
| − | Antriebaus = 1
| + | |
| − | Ugrund = Str(mit_acc_roll)
| + | |
| − | Ugrund = "*Roll " + Ugrund
| + | |
| − | End If
| + | |
| − | If K_diff > 10 Then 'Plattform rotiert zu schnell
| + | |
| − | Notaus = 1
| + | |
| − | Antriebaus = 1
| + | |
| − | Ugrund = Str(k_diff)
| + | |
| − | Ugrund = "*Gier " + Ugrund
| + | |
| − | End If
| + | |
| − | If K_diff < -10 Then 'Plattform rotiert zu schnell
| + | |
| − | Notaus = 1
| + | |
| − | Antriebaus = 1
| + | |
| − | Ugrund = Str(k_diff)
| + | |
| − | Ugrund = "*Gier " + Ugrund
| + | |
| − | End If
| + | |
| − | '</Not-Aus Kriterien abprüfen>
| + | |
| − | Else
| + | |
| − | If Fusscount > 0 Then Antriebaus = 0
| + | |
| − | End If
| + | |
| − | | + | |
| − | '<Akkuspannung berechnen>
| + | |
| − | If Nummotors = 2 Then
| + | |
| − | Ugemessen = U_links + U_rechts
| + | |
| − | Shift Ugemessen , Right , 1 , Signed 'Div by 2 weil 2 Motoren
| + | |
| − | Else
| + | |
| − | Ugemessen = U_links
| + | |
| − | End If
| + | |
| − | '</Akkuspannung berechnen>
| + | |
| − | | + | |
| − | '<Gesamtstrom berechnen>
| + | |
| − | If Nummotors = 2 Then
| + | |
| − | Igemessen = I_links + I_rechts
| + | |
| − | Else
| + | |
| − | Igemessen = I_links
| + | |
| − | End If
| + | |
| − | '</Gesamtstrom berechnen>
| + | |
| − | | + | |
| − | '<verbrauchte Amperestunden berechnen>
| + | |
| − | If Igemessen > 0 Then
| + | |
| − | Summe_as_entladen = Summe_as_entladen + Igemessen 'Verbrauchte
| + | |
| − | End If
| + | |
| − | If Igemessen < 0 Then
| + | |
| − | Summe_as_laden = Summe_as_laden - Igemessen 'Rückgespeiste
| + | |
| − | End If
| + | |
| − | 'mAh aus den Amperestunden rausholen um Überläufe zu verhindern
| + | |
| − | 'Die 360000 setzen sich zusammen aus:
| + | |
| − | 'Igemessen in mA -> Faktor 1
| + | |
| − | '100 Messungen pro Sekunde -> mal 100
| + | |
| − | '1 mAh = 60 Sekunden * 60 mAsekunden -> 3600
| + | |
| − | '360000 = 1 * 100 * 3600
| + | |
| − | If Summe_as_entladen > 360000 Then
| + | |
| − | Incr Summe_mah_entladen
| + | |
| − | Summe_as_entladen = Summe_as_entladen - 360000
| + | |
| − | End If
| + | |
| − | If Summe_as_laden > 360000 Then 'Das kann passieren wenns den Berg runter geht
| + | |
| − | Incr Summe_mah_laden
| + | |
| − | Summe_as_laden = Summe_as_laden - 360000
| + | |
| − | End If
| + | |
| − | Erzeugt = Summe_mah_laden
| + | |
| − | Verbraucht = Summe_mah_entladen
| + | |
| − | Erzeugt = Erzeugt * 0.7 'Das ist der Akku-Wirkungsgrad 0.7 (0.85) bezogen auf den Stom
| + | |
| − | Verbraucht = Verbraucht - Erzeugt
| + | |
| − | Akkuinhalt = Akkukap
| + | |
| − | Akkuverbrauch = Verbraucht
| + | |
| − | Akkuprozent = Akkuverbrauch / Akkuinhalt
| + | |
| − | Akkuprozent = Akkuprozent * 1000
| + | |
| − | Akkuprozent = Int(akkuprozent)
| + | |
| − | Akkustand = Akkuprozent
| + | |
| − | '</verbrauchte As berechnen>
| + | |
| − | | + | |
| − | '<Strecke berechnen>
| + | |
| − | Kx = K_links + K_rechts
| + | |
| − | Kx = Kx / 2
| + | |
| − | Strecke = Kx * Di
| + | |
| − | Zentimeter = Zentimeter + Strecke
| + | |
| − | If Zentimeter >= 100 Then
| + | |
| − | Incr Meter
| + | |
| − | Zentimeter = Zentimeter - 100
| + | |
| − | End If
| + | |
| − | If Zentimeter < 0 Then
| + | |
| − | Decr Meter
| + | |
| − | Zentimeter = Zentimeter + 100
| + | |
| − | End If
| + | |
| − | If Meter >= 1000 Then
| + | |
| − | Incr Kilometer
| + | |
| − | Meter = Meter - 1000
| + | |
| − | End If
| + | |
| − | If Meter < 0 Then
| + | |
| − | Decr Kilometer
| + | |
| − | Meter = Meter + 1000
| + | |
| − | End If
| + | |
| − | '</Strecke berechnen>
| + | |
| − | | + | |
| − | '<Geschwindigkeit berechnen>
| + | |
| − | Kv = Kv + Kx
| + | |
| − | Kmh = Kv * Kmhfaktor
| + | |
| − | Kv = Kv * 0.75 'Bei Änderung auch den kmhfaktor neu berechnen
| + | |
| − | If Kmh > Max_v Then Max_v = Kmh
| + | |
| − | If Kmh < Min_v Then Min_v = Kmh
| + | |
| − | '</Geschwindigkeit berechnen>
| + | |
| − | | + | |
| − | If Bzeit < 500 Then Incr Bzeit
| + | |
| − | Incr Intcount
| + | |
| − | '******************************************************************************
| + | |
| − | 'ADiverse Werte werden an den Tacho geschickt. Manche für die Funktion
| + | |
| − | 'des Tachos, andere um die Steuerung zu optimieren.
| + | |
| − | '******************************************************************************
| + | |
| − | Incr Tachocount
| + | |
| − | | + | |
| − | Select Case Tachocount
| + | |
| − | Case 0
| + | |
| − | B(1) = 40 'Error Word
| + | |
| − | B(2) = Errorword1
| + | |
| − | B(3) = Errorword2
| + | |
| − | B(5) = 1
| + | |
| − | Case 1
| + | |
| − | B(1) = 1 'U
| + | |
| − | U = Ugemessen
| + | |
| − | B(2) = Motormeldung(1)
| + | |
| − | B(3) = Motormeldung(2)
| + | |
| − | B(5) = 1
| + | |
| − | Case 2
| + | |
| − | B(1) = 2 'I
| + | |
| − | I = Igemessen / 10
| + | |
| − | B(2) = Motormeldung(3)
| + | |
| − | B(3) = Motormeldung(4)
| + | |
| − | B(5) = 1
| + | |
| − | Case 3
| + | |
| − | B(1) = 3 'Km/h
| + | |
| − | B(2) = Kmhmeldung(1)
| + | |
| − | B(3) = Kmhmeldung(2)
| + | |
| − | B(5) = 1
| + | |
| − | Case 4
| + | |
| − | B(1) = 5 'Akkuprozente
| + | |
| − | B(2) = Akkumeldung(1)
| + | |
| − | B(3) = Akkumeldung(2)
| + | |
| − | B(5) = 1
| + | |
| − | Case 5
| + | |
| − | B(1) = 7 'Meter
| + | |
| − | B(2) = Metermeldung(1)
| + | |
| − | B(3) = Metermeldung(2)
| + | |
| − | B(5) = 1
| + | |
| − | Case 6
| + | |
| − | B(1) = 6 'Kilometer
| + | |
| − | B(2) = Kilometermeldung(1)
| + | |
| − | B(3) = Kilometermeldung(2)
| + | |
| − | B(5) = 1
| + | |
| − | Case 7
| + | |
| − | If Antriebaus = 0 Then
| + | |
| − | B(1) = 8 'Low
| + | |
| − | B(2) = Mit_acc_roll1
| + | |
| − | B(3) = Mit_acc_roll2
| + | |
| − | B(5) = 1
| + | |
| − | Else
| + | |
| − | B(1) = 12 'Low
| + | |
| − | B(2) = Null_roll1
| + | |
| − | B(3) = Null_roll2
| + | |
| − | B(5) = 1
| + | |
| − | End If
| + | |
| − | Case 8
| + | |
| − | If Antriebaus = 0 Then
| + | |
| − | B(1) = 9 'High
| + | |
| − | B(2) = Mit_acc_roll3
| + | |
| − | B(3) = Mit_acc_roll4
| + | |
| − | B(5) = 1
| + | |
| − | Else
| + | |
| − | B(1) = 13 'High
| + | |
| − | B(2) = Null_roll3
| + | |
| − | B(3) = Null_roll4
| + | |
| − | B(5) = 1
| + | |
| − | End If
| + | |
| − | Case 9
| + | |
| − | B(1) = 4 'Status
| + | |
| − | B(2) = Antriebaus
| + | |
| − | B(3) = Ta
| + | |
| − | B(5) = 1
| + | |
| − | Case 10
| + | |
| − | If Antriebaus = 0 Then
| + | |
| − | B(1) = 10 'acc_Nick
| + | |
| − | B(2) = Mit_acc_nick1
| + | |
| − | B(3) = Mit_acc_nick2
| + | |
| − | B(5) = 1
| + | |
| − | Else
| + | |
| − | B(1) = 14
| + | |
| − | B(2) = Null_nick1
| + | |
| − | B(3) = Null_nick2
| + | |
| − | B(5) = 1
| + | |
| − | End If
| + | |
| − | Case 11 'Nick und Roll
| + | |
| − | If Antriebaus = 0 Then
| + | |
| − | B(1) = 11 'acc_Nick
| + | |
| − | B(2) = Mit_acc_nick3
| + | |
| − | B(3) = Mit_acc_nick4
| + | |
| − | B(5) = 1
| + | |
| − | Else
| + | |
| − | B(1) = 15
| + | |
| − | B(2) = Null_nick3
| + | |
| − | B(3) = Null_nick4
| + | |
| − | B(5) = 1
| + | |
| − | End If
| + | |
| − | Case 12
| + | |
| − | B(1) = 16 'Stellwert
| + | |
| − | B(2) = Stellwert1
| + | |
| − | B(3) = Stellwert2
| + | |
| − | B(5) = 1
| + | |
| − | Case 13
| + | |
| − | B(1) = 17 'Stellwert
| + | |
| − | B(2) = Stellwert3
| + | |
| − | B(3) = Stellwert4
| + | |
| − | B(5) = 1
| + | |
| − | Case 14
| + | |
| − | Gyronick = Sig_gyro_nick
| + | |
| − | B(1) = 18 'Gyro Nick_l
| + | |
| − | B(2) = Gyronick1
| + | |
| − | B(3) = Gyronick2
| + | |
| − | B(5) = 1
| + | |
| − | Case 15
| + | |
| − | B(1) = 19 'Gyro Nick_h
| + | |
| − | B(2) = Gyronick3
| + | |
| − | B(3) = Gyronick4
| + | |
| − | B(5) = 1
| + | |
| − | Case 16
| + | |
| − | Kksum = K_sum
| + | |
| − | B(1) = 20 '??_l
| + | |
| − | B(2) = Kksum1
| + | |
| − | B(3) = Kksum2
| + | |
| − | B(5) = 1
| + | |
| − | Case 17
| + | |
| − | B(1) = 21 '??_h
| + | |
| − | B(2) = Kksum3
| + | |
| − | B(3) = Kksum4
| + | |
| − | B(5) = 1
| + | |
| − | If Antriebaus = 0 Then Tachocount = 255 'Gleich zu 0 überlaufen lassen
| + | |
| − | Case 18
| + | |
| − | B(1) = 22
| + | |
| − | B(2) = Pf1
| + | |
| − | B(3) = Pf2
| + | |
| − | B(5) = 1
| + | |
| − | Case 19
| + | |
| − | B(1) = 23
| + | |
| − | B(2) = Pf3
| + | |
| − | B(3) = Pf4
| + | |
| − | B(5) = 1
| + | |
| − | Case 20
| + | |
| − | B(1) = 24
| + | |
| − | B(2) = If1
| + | |
| − | B(3) = If2
| + | |
| − | B(5) = 1
| + | |
| − | Case 21
| + | |
| − | B(1) = 25
| + | |
| − | B(2) = If3
| + | |
| − | B(3) = If4
| + | |
| − | B(5) = 1
| + | |
| − | Case 22
| + | |
| − | B(1) = 26
| + | |
| − | B(2) = Df1
| + | |
| − | B(3) = Df2
| + | |
| − | B(5) = 1
| + | |
| − | Case 23
| + | |
| − | B(1) = 27
| + | |
| − | B(2) = Df3
| + | |
| − | B(3) = Df4
| + | |
| − | B(5) = 1
| + | |
| − | Case 24
| + | |
| − | B(1) = 28
| + | |
| − | B(2) = Mpf1
| + | |
| − | B(3) = Mpf2
| + | |
| − | B(5) = 1
| + | |
| − | Case 25
| + | |
| − | B(1) = 29
| + | |
| − | B(2) = Mpf3
| + | |
| − | B(3) = Mpf4
| + | |
| − | B(5) = 1
| + | |
| − | Case 26
| + | |
| − | B(1) = 30
| + | |
| − | B(2) = Mvf1
| + | |
| − | B(3) = Mvf2
| + | |
| − | B(5) = 1
| + | |
| − | Case 27
| + | |
| − | B(1) = 31
| + | |
| − | B(2) = Mvf3
| + | |
| − | B(3) = Mvf4
| + | |
| − | B(5) = 1
| + | |
| − | Case 28
| + | |
| − | B(1) = 32
| + | |
| − | B(2) = Mplf1
| + | |
| − | B(3) = Mplf2
| + | |
| − | B(5) = 1
| + | |
| − | Case 29
| + | |
| − | B(1) = 33
| + | |
| − | B(2) = Mplf3
| + | |
| − | B(3) = Mplf4
| + | |
| − | B(5) = 1
| + | |
| − | Case 30
| + | |
| − | B(1) = 34
| + | |
| − | B(2) = Mvlf1
| + | |
| − | B(3) = Mvlf2
| + | |
| − | B(5) = 1
| + | |
| − | Case 31
| + | |
| − | B(1) = 35
| + | |
| − | B(2) = Mvlf3
| + | |
| − | B(3) = Mvlf4
| + | |
| − | B(5) = 1
| + | |
| − | Case 32
| + | |
| − | B(1) = 36 'Port Status
| + | |
| − | B(2) = Portc
| + | |
| − | B(3) = Porta
| + | |
| − | B(5) = 1
| + | |
| − | Case 33
| + | |
| − | B(1) = 37 'Fussschalter 1
| + | |
| − | Wwert = Adc0 'Word
| + | |
| − | B(2) = Wwert1
| + | |
| − | B(3) = Wwert2
| + | |
| − | B(5) = 1
| + | |
| − | Case 34
| + | |
| − | B(1) = 38 'Fussschalter 2
| + | |
| − | Wwert = Adc1 'Word
| + | |
| − | B(2) = Wwert1
| + | |
| − | B(3) = Wwert2
| + | |
| − | B(5) = 1
| + | |
| − | Case 35
| + | |
| − | B(1) = 39 'Fussschalter gesamt
| + | |
| − | B(2) = Fussschalter
| + | |
| − | B(3) = 0
| + | |
| − | B(5) = 1
| + | |
| − | Tachocount = 255
| + | |
| − | Case Else
| + | |
| − | B(5) = 0 'Nichts ausgeben
| + | |
| − | End Select
| + | |
| − | | + | |
| − | If Intcount = 99 Then Intcount = 255
| + | |
| − | | + | |
| − | If B(5) = 1 Then
| + | |
| − | 'Checksumme berechnen
| + | |
| − | B(4) = B(1)
| + | |
| − | B(4) = B(4) + B(2)
| + | |
| − | B(4) = B(4) + B(3)
| + | |
| − | 'Print Chr(b(1)) ; Chr(b(2)) ; Chr(b(3)) ; Chr(b(4)) ; Chr(13);
| + | |
| − | 'Print geht so in Assembler:
| + | |
| − | !LDS R24,{B(1)} 'Adresse von b(1)
| + | |
| − | !STS udr,R24
| + | |
| − | Warten11:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten11
| + | |
| − | !LDS R24,{B(2)} 'Adresse von b(2)
| + | |
| − | !STS udr,R24
| + | |
| − | Warten12:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten12
| + | |
| − | !lds R24,{B(3)} 'Adresse von B(3)
| + | |
| − | !STS udr,R24
| + | |
| − | Warten13:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten13
| + | |
| − | !LDS R24,{B(4)} 'Adresse von B(4)
| + | |
| − | !STS udr,R24
| + | |
| − | Warten14:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten14
| + | |
| − | !LDI R24,13 'CR
| + | |
| − | !STS udr,R24
| + | |
| − | Warten15:
| + | |
| − | !LDS R24,UCSR0A
| + | |
| − | !BST R24,5
| + | |
| − | !Brtc warten15
| + | |
| − | | + | |
| − | Ta = Timer0 'Um festzustellen ob der Interrupt zu lange dauert
| + | |
| − | 'Wenn Ja, ist der Zählwert nahe 255
| + | |
| − | End If
| + | |
| − | Return
| + | |
| − | | + | |
| − | Sub Flashled(byval Which As Byte , Byval Dauer_ms As Byte)
| + | |
| − | Dim Done As Byte
| + | |
| − | Dim Waitstarttime As Byte
| + | |
| − | Dim Xx As Byte
| + | |
| − | | + | |
| − | Select Case Which
| + | |
| − | Case 0 'Both
| + | |
| − | Led1 = 1
| + | |
| − | Led2 = 1
| + | |
| − | Waitms Dauer_ms
| + | |
| − | Led1 = 0
| + | |
| − | Led2 = 0
| + | |
| − | Waitms Dauer_ms
| + | |
| − | Case 1 'LED1
| + | |
| − | Led1 = 1
| + | |
| − | Waitms Dauer_ms
| + | |
| − | Led1 = 0
| + | |
| − | Waitms Dauer_ms
| + | |
| − | Case 2 'LED2
| + | |
| − | Led2 = 1
| + | |
| − | Waitms Dauer_ms
| + | |
| − | Led2 = 0
| + | |
| − | Waitms Dauer_ms
| + | |
| − | End Select
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Readfussschalter:
| + | |
| − | Adc0 = Getadc(0)
| + | |
| − | If Adc0 > Fussschalterschwelle Then
| + | |
| − | Fussschalter.0 = 1
| + | |
| − | Else
| + | |
| − | Fussschalter.0 = 0
| + | |
| − | End If
| + | |
| − | | + | |
| − | Adc1 = Getadc(1)
| + | |
| − | If Adc1 > Fussschalterschwelle Then
| + | |
| − | Fussschalter.1 = 1
| + | |
| − | Else
| + | |
| − | Fussschalter.1 = 0
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Fussschalter = 0 Then 'Max 0.5 Sekunden ohne Fussschalter
| + | |
| − | If Fusscount > 0 Then Decr Fusscount
| + | |
| − | Else
| + | |
| − | Fusscount = 50 'alles OK
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Fusscount = 0 Then
| + | |
| − | If Antriebaus = 0 Then
| + | |
| − | Antriebaus = 1
| + | |
| − | Waitms 100 'Damit der Regel_interrupt auch was davon mitbekommt
| + | |
| − | 'Disable Interrupts
| + | |
| − | 'Betriebsdatenschreiber
| + | |
| − | 'Enable Interrupts
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | Return
| + | |
| − | | + | |
| − | Read_gyro: 'Beschleunigung
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Gyroadress_w
| + | |
| − | 'Start address for Read
| + | |
| − | I2cwbyte &B10101000 'Out_x_l AND &B10000000
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Gyroadress_r
| + | |
| − | 'I2crbyte Temperatur , Ack
| + | |
| − | 'I2crbyte Status , Ack
| + | |
| − | | + | |
| − | I2crbyte Gyro_roll1 , Ack
| + | |
| − | I2crbyte Gyro_roll2 , Ack
| + | |
| − | | + | |
| − | I2crbyte Gyro_nick1 , Ack
| + | |
| − | I2crbyte Gyro_nick2 , Ack
| + | |
| − | | + | |
| − | I2crbyte Gyro_gier1 , Ack
| + | |
| − | I2crbyte Gyro_gier2 , Nack
| + | |
| − | I2cstop
| + | |
| − | Return
| + | |
| − | | + | |
| − | Read_acc: 'Neigung
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Accadress_w
| + | |
| − | 'Start address for Read
| + | |
| − | I2cwbyte &B10101000 'Out_x_l_a AND &B10000000
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Accadress_r
| + | |
| − | | + | |
| − | 'I2crbyte Status_a , Ack
| + | |
| − | | + | |
| − | I2crbyte Accroll_l , Ack
| + | |
| − | I2crbyte Accroll_h , Ack
| + | |
| − | Acc_roll = Accroll
| + | |
| − | Acc_roll = Acc_roll / 2 'Divisor = Empfindlichkeit
| + | |
| − | | + | |
| − | I2crbyte Accnick_l , Ack
| + | |
| − | I2crbyte Accnick_h , Ack
| + | |
| − | Acc_nick = Accnick
| + | |
| − | Acc_nick = Acc_nick / 10 'Divisor = Empfindlichkeit
| + | |
| − | | + | |
| − | I2crbyte Accgier_l , Ack
| + | |
| − | I2crbyte Accgier_h , Nack
| + | |
| − | Acc_gier = Accgier
| + | |
| − | Acc_gier = Acc_gier / 10 'Divisor = Empfindlichkeit
| + | |
| − | I2cstop
| + | |
| − | Return
| + | |
| − | | + | |
| − | 'Get_mag_data:
| + | |
| − | ' Slaveadress = Magadress
| + | |
| − | ' Subadress = Out_x_h_m
| + | |
| − | ' Gosub Read_6_mag
| + | |
| − | | + | |
| − | ' Xmag = Dataarray(1)
| + | |
| − | ' Shift Xmag , Left , 8
| + | |
| − | ' Xmag = Xmag + Dataarray(2)
| + | |
| − | | + | |
| − | ' Ymag = Dataarray(3)
| + | |
| − | ' Shift Ymag , Left , 8
| + | |
| − | ' Ymag = Ymag + Dataarray(4)
| + | |
| − | | + | |
| − | ' Zmag = Dataarray(5)
| + | |
| − | ' Shift Zmag , Left , 8
| + | |
| − | ' Zmag = Zmag + Dataarray(6)
| + | |
| − | | + | |
| − | ' Xmag = Xmag - Xmagoff
| + | |
| − | ' Ymag = Ymag - Ymagoff
| + | |
| − | 'Return
| + | |
| − | | + | |
| − | Init_gyro:
| + | |
| − | 'refer to MiniMu9 L3G4200D_Gyro.pdf, page 29
| + | |
| − | Slaveadress = Gyroadress_w
| + | |
| − | Subadress = Ctrl_reg1
| + | |
| − | '01 ==> 200Hz
| + | |
| − | ' 11 ==> Bandwidth = 70
| + | |
| − | ' 0 ==> Power Down Mode
| + | |
| − | ' 1 ==> Z-Axis enable
| + | |
| − | ' 1 ==> Y-Axis enable
| + | |
| − | ' 1 ==> X-Axis enable
| + | |
| − | Databyte = &B00001111 'Enable x, y, z and turn off power down
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Slaveadress
| + | |
| − | I2cwbyte Subadress
| + | |
| − | I2cwbyte Databyte
| + | |
| − | I2cstop
| + | |
| − | Subadress = Ctrl_reg2
| + | |
| − | | + | |
| − | Databyte = &B0010_1001 'adjust/use the HPF
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Slaveadress
| + | |
| − | I2cwbyte Subadress
| + | |
| − | I2cwbyte Databyte
| + | |
| − | I2cstop
| + | |
| − | | + | |
| − | Subadress = Ctrl_reg3
| + | |
| − | Databyte = &B0000_1000
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Slaveadress
| + | |
| − | I2cwbyte Subadress
| + | |
| − | I2cwbyte Databyte
| + | |
| − | I2cstop
| + | |
| − | | + | |
| − | Subadress = Ctrl_reg4
| + | |
| − | '1 ==> Block Data Update
| + | |
| − | ' 0 ==> BLE
| + | |
| − | ' 00 ==> 250 dps
| + | |
| − | ' 0 ==> not used
| + | |
| − | ' 00 ==> Self Test 0=Normal Mode
| + | |
| − | ' 0 ==> SIM 0=4-wire interface
| + | |
| − | Databyte = &B10000000
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Slaveadress
| + | |
| − | I2cwbyte Subadress
| + | |
| − | I2cwbyte Databyte
| + | |
| − | I2cstop
| + | |
| − | | + | |
| − | Subadress = Ctrl_reg5
| + | |
| − | Databyte = &B0000_0000 'high-pass filtering of outputs
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Slaveadress
| + | |
| − | I2cwbyte Subadress
| + | |
| − | I2cwbyte Databyte
| + | |
| − | I2cstop
| + | |
| − | Return
| + | |
| − | | + | |
| − | Init_acc:
| + | |
| − | Slaveadress = Accadress_w
| + | |
| − | Subadress = Ctrl_reg1_a
| + | |
| − | '001 ==> Normal Mode
| + | |
| − | ' 01 ==> 100Hz, Bandwith=74
| + | |
| − | ' 1 ==> Z-Axis enable
| + | |
| − | ' 1 ==> Y-Axis enable
| + | |
| − | ' 1 ==> X-Axis enable
| + | |
| − | Databyte = &B00101111
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Slaveadress
| + | |
| − | I2cwbyte Subadress
| + | |
| − | I2cwbyte Databyte
| + | |
| − | I2cstop
| + | |
| − | | + | |
| − | Slaveadress = Accadress_w
| + | |
| − | Subadress = Ctrl_reg4_a
| + | |
| − | '1 ==> Continuous, update when finished
| + | |
| − | ' 0 ==> BLE
| + | |
| − | ' 00 ==> FSE = 2g
| + | |
| − | ' 0 ==> Self Test Sign
| + | |
| − | ' 0 ==> not used
| + | |
| − | ' 0 ==> Self Test Enable
| + | |
| − | ' 0 ==> not used
| + | |
| − | Databyte = &B10000000 'Block Data Update, LSB low, Scale +-2g
| + | |
| − | I2cstart
| + | |
| − | I2cwbyte Slaveadress
| + | |
| − | I2cwbyte Subadress
| + | |
| − | I2cwbyte Databyte
| + | |
| − | I2cstop
| + | |
| − | Return
| + | |
| − | | + | |
| − | 'Init_mag:
| + | |
| − | ' Slaveadress = Magadress
| + | |
| − | ' Subadress = Cra_reg_m
| + | |
| − | ' Databyte = &B00011000 '75Hz Output
| + | |
| − | ' I2cstart
| + | |
| − | ' I2cwbyte Slaveadress
| + | |
| − | ' I2cwbyte Subadress
| + | |
| − | ' I2cwbyte Databyte
| + | |
| − | ' I2cstop
| + | |
| − | | + | |
| − | ' Slaveadress = Magadress
| + | |
| − | ' Subadress = Crb_reg_m
| + | |
| − | ' Databyte = &B01000000 'range +-1.9Gauss
| + | |
| − | ' I2cstart
| + | |
| − | ' I2cwbyte Slaveadress
| + | |
| − | ' I2cwbyte Subadress
| + | |
| − | ' I2cwbyte Databyte
| + | |
| − | ' I2cstop
| + | |
| − | | + | |
| − | ' Slaveadress = Magadress
| + | |
| − | ' Subadress = Mr_reg_m
| + | |
| − | ' Databyte = &B00000000 'continious mode
| + | |
| − | ' I2cstart
| + | |
| − | ' I2cwbyte Slaveadress
| + | |
| − | ' I2cwbyte Subadress
| + | |
| − | ' I2cwbyte Databyte
| + | |
| − | ' I2cstop
| + | |
| − | 'Return
| + | |
| − | | + | |
| − | Sub Resetdata
| + | |
| − | Disable Interrupts
| + | |
| − | Regelzeit = 0
| + | |
| − | Regelzeitmax = 0
| + | |
| − | Mit_acc_nick_max = 0
| + | |
| − | Mit_acc_roll_max = 0
| + | |
| − | Mit_acc_nick_min = 0
| + | |
| − | Mit_acc_roll_min = 0
| + | |
| − | Pwm_rechts_max = 0
| + | |
| − | Pwm_links_max = 0
| + | |
| − | Seriell_err_rechts = 0
| + | |
| − | Seriell_err_links = 0
| + | |
| − | K_diff_min = 0
| + | |
| − | K_diff_max = 0
| + | |
| − | Antriebaus = 0
| + | |
| − | Fusscount = 50 '0,5 Sekunden
| + | |
| − | Enable Interrupts
| + | |
| − | End Sub
| + | |
| − | </pre>
| + | |
| − | | + | |
| − | '''Display3000.bas (BASCOM)'''
| + | |
| − | <pre>
| + | |
| − | | + | |
| − | '****************Listrik01 LCD Display Steuerung Version 01 *****************
| + | |
| − | $hwstack = 256
| + | |
| − | $swstack = 256
| + | |
| − | $framesize = 64
| + | |
| − | $regfile = "m2561def.dat"
| + | |
| − | $crystal = 16000000 'microcontroller crystal frequency
| + | |
| − | $baud1 = 57600
| + | |
| − | | + | |
| − | '(start block comment
| + | |
| − | ---------------------
| + | |
| − | | |
| + | |
| − | | --------------- |
| + | |
| − | | | | |
| + | |
| − | | | | |
| + | |
| − | | | | |
| + | |
| − | | | | |
| + | |
| − | | | | |
| + | |
| − | | | | |
| + | |
| − | | | | |
| + | |
| − | | | | | Port D.0 = Tageskilometerzähler Reset
| + | |
| − | | | | |
| + | |
| − | | | | |
| + | |
| − | | | --------------| | Display:
| + | |
| − | | | 1| 2| |3| | 1 = Zyklusdauer (0..255)
| + | |
| − | | --------------- | 2 = Motorleistung links
| + | |
| − | | | 3 = Motorleistung rechts
| + | |
| − | | |
| + | |
| − | | O1 O2 |
| + | |
| − | | O5 | Taster:
| + | |
| − | | | 1: PinD.7 Edit: Zeile abwärts
| + | |
| − | | O7 O8 | 2: PinD.4 Edit: Zeile aufwärts
| + | |
| − | | | 3: PinE.5 Blättern
| + | |
| − | | O6 | 4: PinE.7 SD-Karte aktivieren
| + | |
| − | | O3 O4 | 5: PinG.0 Edit: Werte übernehmen
| + | |
| − | | | 6: PinG.3 unbenutzt
| + | |
| − | | | 7: PinG.1 Edit: Zahl kleiner
| + | |
| − | | | 8: PinD.5 Edit: Zahl größer
| + | |
| − | | | 9: Cpu Reset
| + | |
| − | | |
| + | |
| − | | | Extern1: PinD.0 Reset Tageskilometerzähler (J3 zu, interner Pullup)
| + | |
| − | | O9 | Extern1: PinD.1 unbenutzt (J3 zu, interner Pullup)
| + | |
| − | ---------------------
| + | |
| − | ')end block comment
| + | |
| − | | + | |
| − | '####################### LCD-Routines ######################################
| + | |
| − | | + | |
| − | 'Definition of used ports and pull up resistors.
| + | |
| − | 'We are using Port B for the SPI-communication to the LCD Display.
| + | |
| − | | + | |
| − | Ddra = &B00000000 'switch all 8 Ports of Port A to input (0),
| + | |
| − | 'Pin (PA.0 - PA.7)
| + | |
| − | Porta = &B11111111 'All port pins have individually selectable pull-up
| + | |
| − | 'resistors. Here we enable these pull-up-resisitors,
| + | |
| − | 'so these Pins are always at logical 1
| + | |
| − | 'You Need To Pull These Pins Against Ground(gnd)
| + | |
| − | | + | |
| − | 'Select Port B as to an output port (data output to the display)
| + | |
| − | Ddrb = &B01110110 'DDR = Data direction register; Port B1, B2, B4, B5, B6
| + | |
| − | 'switched to output (1) as needed by the display
| + | |
| − | Portb = &B10001001 'the other ports of Port B are inputs with
| + | |
| − | 'switched on pull up resistors
| + | |
| − | | + | |
| − | Ddrc = &B00000000 'switch all Ports of Port C to input
| + | |
| − | Portc = &B11111111 'all pull-up-Resistors turned on
| + | |
| − | | + | |
| − | Ddrd = &B00000000 'switchall Ports of Port D to input
| + | |
| − | Portd = &B11110011 'almost all pull-up-Resistors turned on
| + | |
| − | | + | |
| − | Ddre = &B10000000 'E7=Output (SD card activate), all other Input
| + | |
| − | Porte = &B11111111 'all pull-up-Resistors turned on
| + | |
| − | | + | |
| − | Ddrf = &B00000000 'switch all Ports of Port F to input
| + | |
| − | Portf = &B11111111 'all pull-up-Resistors turned on
| + | |
| − | | + | |
| − | Ddrg = &B00000000 'switch all Ports of Port G to input
| + | |
| − | Portg = &B11111111 'all pull-up-Resistors turned on
| + | |
| − | '#############################################################################
| + | |
| − | | + | |
| − | Declare Sub Activate_display_bus
| + | |
| − | Declare Sub Activate_sd_bus()
| + | |
| − | Declare Sub Minmax()
| + | |
| − | Declare Function Trimtext(t As String) As String * 22
| + | |
| − | Declare Sub Drawpagestatics
| + | |
| − | | + | |
| − | Const Titel = "Tacho 0.1 "
| + | |
| − | | + | |
| − | Dim Ep0 As Byte At $0201
| + | |
| − | Dim Ep1 As Byte At $0202
| + | |
| − | Dim Ep2 As Byte At $0203
| + | |
| − | Dim Ep3 As Byte At $0204
| + | |
| − | Dim Ep4 As Byte At $0205
| + | |
| − | Dim Ep5 As Byte At $0206
| + | |
| − | Dim Iwert As Integer At $0203 Overlay
| + | |
| − | Dim Wwert As Integer At $0203 Overlay
| + | |
| − | Dim Index As Byte At $202 Overlay
| + | |
| − | | + | |
| − | Dim Maccx As Long At $0207
| + | |
| − | Dim Maccx1 As Byte At $0207 Overlay
| + | |
| − | Dim Maccx2 As Byte At $0208 Overlay
| + | |
| − | Dim Maccx3 As Byte At $0209 Overlay
| + | |
| − | Dim Maccx4 As Byte At $020a Overlay
| + | |
| − | Dim Maccy As Long At $020b
| + | |
| − | Dim Maccy1 As Byte At $020b Overlay
| + | |
| − | Dim Maccy2 As Byte At $020c Overlay
| + | |
| − | Dim Maccy3 As Byte At $020d Overlay
| + | |
| − | Dim Maccy4 As Byte At $020e Overlay
| + | |
| − | | + | |
| − | Dim Nullx As Long At $020f
| + | |
| − | Dim Nullx1 As Byte At $020f Overlay
| + | |
| − | Dim Nullx2 As Byte At $0210 Overlay
| + | |
| − | Dim Nullx3 As Byte At $0211 Overlay
| + | |
| − | Dim Nullx4 As Byte At $0212 Overlay
| + | |
| − | Dim Nully As Long At $0213
| + | |
| − | Dim Nully1 As Byte At $0213 Overlay
| + | |
| − | Dim Nully2 As Byte At $0214 Overlay
| + | |
| − | Dim Nully3 As Byte At $0215 Overlay
| + | |
| − | Dim Nully4 As Byte At $0216 Overlay
| + | |
| − | Dim Sw As Single At $00217
| + | |
| − | | + | |
| − | Dim Sw1 As Byte At $0217 Overlay
| + | |
| − | Dim Sw2 As Byte At $0218 Overlay
| + | |
| − | Dim Sw3 As Byte At $0219 Overlay
| + | |
| − | Dim Sw4 As Byte At $021a Overlay
| + | |
| − | | + | |
| − | Dim Gyronick As Long At $0021b
| + | |
| − | Dim Gyronick1 As Byte At $021b Overlay
| + | |
| − | Dim Gyronick2 As Byte At $021c Overlay
| + | |
| − | Dim Gyronick3 As Byte At $021d Overlay
| + | |
| − | Dim Gyronick4 As Byte At $021e Overlay
| + | |
| − | | + | |
| − | Dim Kksum As Single At $0021f
| + | |
| − | Dim Kksum1 As Byte At $021f Overlay
| + | |
| − | Dim Kksum2 As Byte At $0220 Overlay
| + | |
| − | Dim Kksum3 As Byte At $0221 Overlay
| + | |
| − | Dim Kksum4 As Byte At $0222 Overlay
| + | |
| − | | + | |
| − | Dim P_faktor As Single At $0223
| + | |
| − | Dim P_f1 As Byte At $0223 Overlay
| + | |
| − | Dim P_f2 As Byte At $0224 Overlay
| + | |
| − | Dim P_f3 As Byte At $0225 Overlay
| + | |
| − | Dim P_f4 As Byte At $0226 Overlay
| + | |
| − | | + | |
| − | Dim I_faktor As Single At $0227
| + | |
| − | Dim I_f1 As Byte At $0227 Overlay
| + | |
| − | Dim I_f2 As Byte At $0228 Overlay
| + | |
| − | Dim I_f3 As Byte At $0229 Overlay
| + | |
| − | Dim I_f4 As Byte At $022a Overlay
| + | |
| − | | + | |
| − | Dim D_faktor As Single At $022b
| + | |
| − | Dim D_f1 As Byte At $022b Overlay
| + | |
| − | Dim D_f2 As Byte At $022c Overlay
| + | |
| − | Dim D_f3 As Byte At $022d Overlay
| + | |
| − | Dim D_f4 As Byte At $022e Overlay
| + | |
| − | | + | |
| − | Dim Mp_faktor As Single At $022f
| + | |
| − | Dim Mp_f1 As Byte At $022f Overlay
| + | |
| − | Dim Mp_f2 As Byte At $0230 Overlay
| + | |
| − | Dim Mp_f3 As Byte At $0231 Overlay
| + | |
| − | Dim Mp_f4 As Byte At $0232 Overlay
| + | |
| − | | + | |
| − | Dim Mv_faktor As Single At $0233
| + | |
| − | Dim Mv_f1 As Byte At $0233 Overlay
| + | |
| − | Dim Mv_f2 As Byte At $0234 Overlay
| + | |
| − | Dim Mv_f3 As Byte At $0235 Overlay
| + | |
| − | Dim Mv_f4 As Byte At $0236 Overlay
| + | |
| − | | + | |
| − | Dim Mpl_faktor As Single At $0237
| + | |
| − | Dim Mpl_f1 As Byte At $0237 Overlay
| + | |
| − | Dim Mpl_f2 As Byte At $0238 Overlay
| + | |
| − | Dim Mpl_f3 As Byte At $0239 Overlay
| + | |
| − | Dim Mpl_f4 As Byte At $023a Overlay
| + | |
| − | | + | |
| − | Dim Mvl_faktor As Single At $023b
| + | |
| − | Dim Mvl_f1 As Byte At $023b Overlay
| + | |
| − | Dim Mvl_f2 As Byte At $023c Overlay
| + | |
| − | Dim Mvl_f3 As Byte At $023d Overlay
| + | |
| − | Dim Mvl_f4 As Byte At $023e Overlay
| + | |
| − | | + | |
| − | Dim Pfaktor As Long
| + | |
| − | Dim Ifaktor As Long
| + | |
| − | Dim Dfaktor As Long
| + | |
| − | Dim Mpfaktor As Long
| + | |
| − | Dim Mvfaktor As Long
| + | |
| − | Dim Mplfaktor As Long
| + | |
| − | Dim Mvlfaktor As Long
| + | |
| − | | + | |
| − | Dim Stellwert As Single
| + | |
| − | Dim Gyro_nick As Long
| + | |
| − | Dim Null_y As Long
| + | |
| − | Dim Null_x As Long
| + | |
| − | Dim Mit_acc_y As Long
| + | |
| − | Dim Mit_acc_x As Long
| + | |
| − | Dim K_sum As Single
| + | |
| − | Dim K_summax As Single
| + | |
| − | Dim K_summin As Single
| + | |
| − | | + | |
| − | Dim Bdummy As Byte
| + | |
| − | Dim Singdummy As Single
| + | |
| − | Dim Wdummy As Word
| + | |
| − | Dim Ldummy As Long
| + | |
| − | Dim Idummy As Integer
| + | |
| − | Dim Kilometer As Word
| + | |
| − | Dim Meter As Integer
| + | |
| − | Dim Akkuprozente As Integer
| + | |
| − | Dim Kmh As Integer
| + | |
| − | Dim Kmhmax As Integer
| + | |
| − | Dim Kmhmin As Integer
| + | |
| − | | + | |
| − | Dim I As Integer
| + | |
| − | Dim Imax As Integer
| + | |
| − | Dim Imin As Integer
| + | |
| − | | + | |
| − | Dim U As Integer
| + | |
| − | Dim Umax As Integer
| + | |
| − | Dim Umin As Integer
| + | |
| − | Dim Ml As Integer
| + | |
| − | Dim Mlmax As Integer
| + | |
| − | Dim Mrmax As Integer
| + | |
| − | Dim Mr As Integer
| + | |
| − | Dim Mlmin As Integer
| + | |
| − | Dim Mrmin As Integer
| + | |
| − | Dim Modus As Byte
| + | |
| − | Dim Editzeile As Byte
| + | |
| − | Dim Utext As String * 22
| + | |
| − | Dim Itext As String * 22
| + | |
| − | Dim Ltext As String * 22
| + | |
| − | Dim L1 As Byte
| + | |
| − | Dim L2 As Byte
| + | |
| − | Dim L3 As Byte
| + | |
| − | Dim Text As String * 22
| + | |
| − | Dim Farbe As Word
| + | |
| − | Dim X1 As Byte
| + | |
| − | Dim Y1 As Byte
| + | |
| − | Dim X2 As Byte
| + | |
| − | Dim Y2 As Byte
| + | |
| − | Dim Startkilometer As Single
| + | |
| − | Dim Ta As Byte
| + | |
| − | Dim Tamax As Byte
| + | |
| − | | + | |
| − | Dim Antriebaus As Byte
| + | |
| − | | + | |
| − | Dim Xoffset As Long
| + | |
| − | Dim Yoffset As Long
| + | |
| − | Dim Ya As Byte
| + | |
| − | Dim Xa As Byte
| + | |
| − | | + | |
| − | Dim Lname As Long
| + | |
| − | Dim Dateiname As String * 12
| + | |
| − | Dim Dateilaenge As Long
| + | |
| − | Dim Dateiaktuell As Byte
| + | |
| − | Dim Gbdriveerror As Byte
| + | |
| − | Dim Ulog As Single
| + | |
| − | Dim Ilog As Single
| + | |
| − | Dim Kmhlog As Single
| + | |
| − | Dim Kmlog As Single
| + | |
| − | Dim Akkuprozentelog As Single
| + | |
| − | Dim Loopcount As Word
| + | |
| − | Dim Aloopcount As Word
| + | |
| − | Dim Logtext As String * 255
| + | |
| − | Dim Zeit As String * 8
| + | |
| − | Dim Sichern As Byte
| + | |
| − | Dim Transferok As Byte
| + | |
| − | | + | |
| − | Dim Hexstr As String * 2
| + | |
| − | | + | |
| − | Dim Hauptstportc As Byte
| + | |
| − | Dim Hauptstporta As Byte
| + | |
| − | Dim Ad0 As Word 'AD value 0...1024
| + | |
| − | Dim Ad1 As Word 'AD value 0...1024
| + | |
| − | Dim Fussschalter As Byte 'Bit0 und Bit1
| + | |
| − | Dim Dummybyte As Byte
| + | |
| − | | + | |
| − | Config Clock = User
| + | |
| − | Config Date = Dmy , Separator = .
| + | |
| − | | + | |
| − | 'No need to call here because Init21_display3000.bas has already done this
| + | |
| − | Call Activate_display_bus
| + | |
| − | | + | |
| − | $include "Y:\Programme\Tools\BASCOM-AVR\Display 3000\Displaymodul\Bascom Programme\für Include\Init21_display3000.bas"
| + | |
| − | | + | |
| − | 'If Porte.7 = 0 Then Activate_sd_bus
| + | |
| − | 'Gbdriveerror = Driveinit() 'Init MMC/SD Card
| + | |
| − | 'If Gbdriveerror = 0 Then
| + | |
| − | ' Include AVR-DOS Configuration and library
| + | |
| − | ' $include "Y:\Programme\Tools\BASCOM-AVR\Display 3000\SD Speicherkartenmodul P001\Bascom Basic\Config_AVR-DOS.BAS"
| + | |
| − | ' Bdummy = Initfilesystem(1) ' Partition 1
| + | |
| − | ' Ldummy = Disksize()
| + | |
| − | ' Ldummy = Ldummy / 1024
| + | |
| − | ' Utext = Str(ldummy)
| + | |
| − | ' Utext = "Size: " + Utext
| + | |
| − | ' Utext = Utext + " mb"
| + | |
| − | ' Ldummy = Diskfree()
| + | |
| − | ' Ldummy = Ldummy / 1024
| + | |
| − | ' Itext = Str(ldummy)
| + | |
| − | ' Itext = "Free: " + Itext
| + | |
| − | ' Itext = Itext + " mb"
| + | |
| − | ' If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | ' gosub Lcd_cls
| + | |
| − | ' call Lcd_print(Titel , 0 , 0 , 1 , 1 , 1 , Yellow , Blue)
| + | |
| − | ' call Lcd_print ("SD-Karte init" , 0 , 18 , 1 , 1 , 1 , Black , White)
| + | |
| − | ' call Lcd_print (Utext , 0 , 27 , 1 , 1 , 1 , Black , White)
| + | |
| − | ' Lcd_print Itext , 0 , 36 , 1 , 1 , 1 , Black , White
| + | |
| − | ' Wait 7
| + | |
| − | ' Else
| + | |
| − | ' If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | ' Ltext = Str(gbdriveerror)
| + | |
| − | ' Ltext = "Fehler: " + Ltext
| + | |
| − | ' gosub Lcd_cls
| + | |
| − | ' call Lcd_print (Titel , 0 , 0 , 1 , 1 , 1 , Yellow , Blue)
| + | |
| − | ' call Lcd_print ("SD-Karte init" , 0 , 18 , 1 , 1 , 1 , Black , White)
| + | |
| − | ' call Lcd_print (Ltext , 0 , 27 , 1 , 1 , 1 , Black , White)
| + | |
| − | ' Wait 7
| + | |
| − | ' End If
| + | |
| − | | + | |
| − | Readeeprom Startkilometer , 1
| + | |
| − | Readeeprom Xoffset , 5
| + | |
| − | Readeeprom Yoffset , 9
| + | |
| − | | + | |
| − | 'Einige Werte vorbelegen um fehlerhafte Grafik zu vermeiden falls keine
| + | |
| − | 'serielle Verbindung besteht
| + | |
| − | Xa = 74
| + | |
| − | Ya = 130
| + | |
| − | Antriebaus = 1
| + | |
| − | Null_x = Xoffset
| + | |
| − | Null_y = Yoffset
| + | |
| − | | + | |
| − | 'If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | Orientation = Portrait180 'landscape mode
| + | |
| − | Graphics_mode = 65k_uncompressed 'select the needed color mode, here 65.536 colors
| + | |
| − | Call Lcd_cls
| + | |
| − | | + | |
| − | Call Drawpagestatics
| + | |
| − | | + | |
| − | Config Timer2 = Timer , Prescale = 128
| + | |
| − | Assr.exclk = 0
| + | |
| − | Assr.as2 = 1
| + | |
| − | | + | |
| − | On Timer2 Tick
| + | |
| − | Enable Timer2
| + | |
| − | Start Timer2
| + | |
| − | | + | |
| − | On Urxc1 Datenempfang
| + | |
| − | Enable Urxc1
| + | |
| − | Enable Interrupts
| + | |
| − | Minmax
| + | |
| − | Do
| + | |
| − | If Pine.5 = 0 Then
| + | |
| − | While Pine.5 = 0 : Wend 'Debounce Button
| + | |
| − | Incr Modus
| + | |
| − | If Gbdriveerror <> 0 Then 'Logging nicht zulassen wenn DriveError
| + | |
| − | If Modus > 3 Then
| + | |
| − | Modus = 0
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | If Modus > 4 Then
| + | |
| − | Modus = 0
| + | |
| − | End If
| + | |
| − | end If
| + | |
| − | | + | |
| − | If Modus <> 3 Then 'nur berechnen wenn die Werte nicht editiert werden
| + | |
| − | Singdummy = P_faktor * 10000
| + | |
| − | Singdummy = Round(Singdummy)
| + | |
| − | Pfaktor = Singdummy
| + | |
| − | | + | |
| − | Singdummy = I_faktor * 1000000
| + | |
| − | Singdummy = Round(Singdummy)
| + | |
| − | Ifaktor = Singdummy
| + | |
| − | | + | |
| − | Singdummy = D_faktor * 1000
| + | |
| − | Singdummy = Round(Singdummy)
| + | |
| − | Dfaktor = Singdummy
| + | |
| − | | + | |
| − | Singdummy = Mp_faktor * 10000
| + | |
| − | Singdummy = Round(Singdummy)
| + | |
| − | Mpfaktor = Singdummy
| + | |
| − | | + | |
| − | Singdummy = Mv_faktor * 1000
| + | |
| − | Singdummy = Round(Singdummy)
| + | |
| − | Mvfaktor = Singdummy
| + | |
| − | | + | |
| − | Singdummy = Mpl_faktor * 10000
| + | |
| − | Singdummy = Round(Singdummy)
| + | |
| − | Mplfaktor = Singdummy
| + | |
| − | | + | |
| − | Singdummy = Mvl_faktor * 1000
| + | |
| − | Singdummy = Round(Singdummy)
| + | |
| − | Mvlfaktor = Singdummy
| + | |
| − | End If
| + | |
| − | | + | |
| − | 'If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | Call Lcd_cls
| + | |
| − | Call Drawpagestatics
| + | |
| − | End If
| + | |
| − | If Modus <> 4 Then 'Nur wenn nicht geloggt wird
| + | |
| − | If U <> 0 Then 'Nur wenn auch schon eine Spannung übertragen wurde
| + | |
| − | If Ta <> 0 Then
| + | |
| − | Idummy = U 'Nur wenn auch schon ein Ta übertragen wurde
| + | |
| − | If Idummy > Umax Then Umax = Idummy
| + | |
| − | If Idummy < Umin Then Umin = Idummy
| + | |
| − | Idummy = I
| + | |
| − | If Idummy > Imax Then Imax = Idummy
| + | |
| − | If Idummy < Imin Then Imin = Idummy
| + | |
| − | Idummy = Kmh
| + | |
| − | If Idummy > Kmhmax Then Kmhmax = Idummy
| + | |
| − | If Idummy < Kmhmin Then Kmhmin = Idummy
| + | |
| − | Bdummy = Ta
| + | |
| − | If Bdummy > Tamax Then Tamax = Bdummy
| + | |
| − | Idummy = Ml
| + | |
| − | If Idummy > Mlmax Then Mlmax = Idummy
| + | |
| − | If Idummy < Mlmin Then Mlmin = Idummy
| + | |
| − | Idummy = Mr
| + | |
| − | If Idummy > Mrmax Then Mrmax = Idummy
| + | |
| − | If Idummy < Mrmin Then Mrmin = Idummy
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | Select Case Modus
| + | |
| − | Case 0
| + | |
| − | 'If Dateiaktuell = 1 Then
| + | |
| − | ' If Porte.7 = 0 Then Activate_sd_bus
| + | |
| − | ' Close #2
| + | |
| − | ' Dateiaktuell = 0
| + | |
| − | 'End If
| + | |
| − | 'If Porte.7 = 1 Then call Activate_display_bus 'Standard Anzeige
| + | |
| − | If Pind.0 = 0 Then
| + | |
| − | Waitms 3
| + | |
| − | If Pind.0 = 0 Then
| + | |
| − | While Pind.0 = 0 : Wend
| + | |
| − | Singdummy = Meter / 1000
| + | |
| − | Singdummy = Singdummy + Kilometer
| + | |
| − | Startkilometer = Singdummy
| + | |
| − | Writeeeprom Startkilometer , 1
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | 'Spannung und Strom
| + | |
| − | Singdummy = U / 100
| + | |
| − | Utext = Fusing(singdummy , "#.#")
| + | |
| − | Utext = Utext + "V"
| + | |
| − | Utext = " " + Utext
| + | |
| − | Singdummy = I / 100
| + | |
| − | Itext = Fusing(singdummy , "#.#")
| + | |
| − | Itext = Itext + "A "
| + | |
| − | L1 = Len(utext)
| + | |
| − | L2 = Len(itext)
| + | |
| − | L1 = L1 + L2
| + | |
| − | L2 = 22 - L1
| + | |
| − | Ltext = String(l2 , 32)
| + | |
| − | Text = Utext + Ltext
| + | |
| − | Text = Text + Itext
| + | |
| − | Lcd_print Text , 0 , 75 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | 'Akku in Prozent
| + | |
| − | Singdummy = Akkuprozente / 10
| + | |
| − | Singdummy = 100 - Singdummy
| + | |
| − | Text = Fusing(singdummy , "#.#" )
| + | |
| − | Text = " " + Text + "% "
| + | |
| − | If Singdummy > 66 Then
| + | |
| − | Farbe = Green
| + | |
| − | Elseif Singdummy > 33 Then
| + | |
| − | Farbe = Yellow
| + | |
| − | Else
| + | |
| − | Farbe = Red
| + | |
| − | End If
| + | |
| − | Singdummy = Singdummy * 1.14 '124 - 8 - 1 - 1 = 114 / 100% = 1.14
| + | |
| − | X2 = Singdummy 'Type cast
| + | |
| − | X2 = X2 + 10 '10 wegen der "100 - Sdummy" weiter oben
| + | |
| − | Lcd_box X2 , 85 , 123 , 94 , White 'Hintergrund löschen
| + | |
| − | Lcd_box 9 , 85 , X2 , 94 , Farbe 'Balken zeichnen
| + | |
| − | 'Text mittig platzieren
| + | |
| − | L1 = Len(text)
| + | |
| − | L1 = L1 * 5
| + | |
| − | L1 = L1 / 2
| + | |
| − | X1 = 66 - L1
| + | |
| − | Lcd_print Text , X1 , 98 , 1 , 1 , 1 , Black , White 'unterm Balken
| + | |
| − | | + | |
| − | 'km/h
| + | |
| − | Singdummy = Kmh / 10
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = Text + "km/h "
| + | |
| − | Text = " " + Text
| + | |
| − | L1 = Len(text)
| + | |
| − | Text = Text + " "
| + | |
| − | L1 = L1 * 4
| + | |
| − | X1 = 66 - L1
| + | |
| − | Lcd_print Text , X1 , 12 , 2 , 1 , 2 , Black , White
| + | |
| − | | + | |
| − | 'km
| + | |
| − | Singdummy = Meter / 1000
| + | |
| − | Singdummy = Singdummy + Kilometer
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = Text + "km "
| + | |
| − | Text = " " + Text
| + | |
| − | L1 = Len(text)
| + | |
| − | L1 = L1 * 5
| + | |
| − | L1 = L1 / 2
| + | |
| − | X1 = 66 - L1
| + | |
| − | Lcd_print Text , X1 , 46 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | 'Tageskilometerzähler
| + | |
| − | Singdummy = Singdummy - Startkilometer
| + | |
| − | Text = Fusing(Singdummy , "#.###")
| + | |
| − | Text = Text + "km "
| + | |
| − | Text = " " + Text
| + | |
| − | L1 = Len(text)
| + | |
| − | L1 = L1 * 5
| + | |
| − | L1 = L1 / 2
| + | |
| − | X1 = 66 - L1
| + | |
| − | Lcd_print Text , X1 , 60 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | If Antriebaus = 1 Then
| + | |
| − | Text = "AUS"
| + | |
| − | Else
| + | |
| − | Text = "RUN"
| + | |
| − | End If
| + | |
| − | 'Text mittig platzieren
| + | |
| − | L1 = Len(text)
| + | |
| − | L1 = L1 * 5 'Schriftlänge in Pixel, jedes Zeichen = 5 Pixel
| + | |
| − | L1 = L1 / 2 'Halbe schriftlänge
| + | |
| − | X1 = 74 - L1 'Text mittig
| + | |
| − | Lcd_print Text , X1 , 148 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | '>>>>>>>>>>>> Fusszeile im Display >>>>>>>>>>>>
| + | |
| − | ' 01234567891111111111222
| + | |
| − | ' 0123456789012
| + | |
| − | ' xxx xxx xxx
| + | |
| − | 'PmotLinks Ta PmotRechts
| + | |
| − | ' L1 L2 L3
| + | |
| − | | + | |
| − | Text = String(22 , 32) 'Fill with spaces
| + | |
| − | | + | |
| − | Utext = Str(ml) 'Pmot_links (Integer)
| + | |
| − | L1 = Len(utext)
| + | |
| − | Mid(text , 0 , L1) = Utext 'insert Ml
| + | |
| − | | + | |
| − | Utext = Str(ta) 'Ticks (Byte)
| + | |
| − | L2 = Len(utext)
| + | |
| − | Mid(text , 10 , L2) = Utext 'insert Ta
| + | |
| − | | + | |
| − | Utext = Str(mr) 'Pmot_rechts (Integer)
| + | |
| − | L3 = Len(utext)
| + | |
| − | X1 = 23 - L3 'Starting position of Mr
| + | |
| − | Mid(text , X1 , L3) = Utext 'insert Mr
| + | |
| − | | + | |
| − | 'L2 = X1 + L3
| + | |
| − | 'L1 = 22 - L2
| + | |
| − | 'Utext = String(l1 , 32)
| + | |
| − | 'Mid(text , L2 , L1) = Utext 'insert final spaces
| + | |
| − | | + | |
| − | Lcd_print Text , 0 , 168 , 1 , 1 , 1 , White , Black
| + | |
| − | '>>>>>>>>>>>> Fusszeile im Display >>>>>>>>>>>>
| + | |
| − | | + | |
| − | If Antriebaus = 1 Then
| + | |
| − | Singdummy = Null_x
| + | |
| − | Singdummy = Singdummy - Xoffset
| + | |
| − | Singdummy = Singdummy / 50
| + | |
| − | If Singdummy > 49 Then Singdummy = 49
| + | |
| − | If Singdummy < -49 Then Singdummy = -49
| + | |
| − | Singdummy = Singdummy + 74
| + | |
| − | X1 = Int(Singdummy)
| + | |
| − | Lcd_draw Xa , 126 , Xa , 134 , 0 , White
| + | |
| − | Lcd_draw X1 , 126 , X1 , 134 , 0 , Black
| + | |
| − | Xa = X1
| + | |
| − | Singdummy = Null_y
| + | |
| − | Singdummy = Singdummy - Yoffset
| + | |
| − | Singdummy = Singdummy / 50
| + | |
| − | If Singdummy > 29 Then Singdummy = 29
| + | |
| − | If Singdummy < -29 Then Singdummy = -29
| + | |
| − | Singdummy = Singdummy + 130
| + | |
| − | Y1 = Int(Singdummy)
| + | |
| − | Lcd_draw 9 , Ya , 18 , Ya , 0 , White
| + | |
| − | Lcd_draw 9 , Y1 , 18 , Y1 , 0 , Black
| + | |
| − | Ya = Y1
| + | |
| − | Else
| + | |
| − | 'Horizontaler Balken
| + | |
| − | Singdummy = Mit_acc_x
| + | |
| − | Singdummy = Singdummy / 50
| + | |
| − | If Singdummy > 49 Then Singdummy = 49
| + | |
| − | If Singdummy < -49 Then Singdummy = -49
| + | |
| − | Singdummy = Singdummy + 74
| + | |
| − | X1 = Int(Singdummy)
| + | |
| − | Lcd_draw Xa , 126 , Xa , 134 , 0 , White
| + | |
| − | Lcd_draw X1 , 126 , X1 , 134 , 0 , Black
| + | |
| − | Xa = X1
| + | |
| − | | + | |
| − | 'Vertikaler Balken
| + | |
| − | Singdummy = Mit_acc_y
| + | |
| − | Singdummy = Singdummy / 50
| + | |
| − | If Singdummy > 29 Then Singdummy = 29
| + | |
| − | If Singdummy < -29 Then Singdummy = -29
| + | |
| − | Singdummy = Singdummy + 130
| + | |
| − | Y1 = Int(Singdummy)
| + | |
| − | Lcd_draw 9 , Ya , 18 , Ya , 0 , White
| + | |
| − | Lcd_draw 9 , Y1 , 18 , Y1 , 0 , Black
| + | |
| − | Ya = Y1
| + | |
| − | End If
| + | |
| − | Case 1 'Details
| + | |
| − | 'If Dateiaktuell = 1 Then
| + | |
| − | ' If Porte.7 = 0 Then Activate_sd_bus
| + | |
| − | ' Close #2
| + | |
| − | ' Dateiaktuell = 0
| + | |
| − | 'End If
| + | |
| − | 'If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | If Pind.0 = 0 Then
| + | |
| − | Waitms 3
| + | |
| − | If Pind.0 = 0 Then
| + | |
| − | While Pind.0 = 0 : Wend
| + | |
| − | If Antriebaus = 1 Then
| + | |
| − | Yoffset = Null_y
| + | |
| − | Xoffset = Null_x
| + | |
| − | Writeeeprom Xoffset , 5
| + | |
| − | Writeeeprom Yoffset , 9
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | Singdummy = U / 100
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " U= " + Text
| + | |
| − | Text = Text + "V"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 9 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Singdummy = I / 100
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " I= " + Text
| + | |
| − | Text = Text + "A"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 18 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Singdummy = Kmh / 10
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " V= " + Text
| + | |
| − | Text = Text + "km/h"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 27 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Singdummy = Meter / 1000
| + | |
| − | Singdummy = Singdummy + Kilometer
| + | |
| − | Text = Fusing(Singdummy , "#.###")
| + | |
| − | Text = " S= " + Text
| + | |
| − | Text = Text + "km "
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 36 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Singdummy = Ml
| + | |
| − | Text = Str(ml )
| + | |
| − | Text = " Pl= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 45 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Singdummy = Mr
| + | |
| − | Text = Str(mr )
| + | |
| − | Text = " Pr= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 54 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Singdummy = Akkuprozente / 10
| + | |
| − | Singdummy = 100 - Singdummy
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = "Akku= " + Text
| + | |
| − | Text = Text + "%"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 63 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Str(mit_acc_x)
| + | |
| − | Text = "Roll= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 72 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Str(mit_acc_y )
| + | |
| − | Text = "Nick= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 81 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Str(null_x )
| + | |
| − | Text = " R0= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 90 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Str(null_y )
| + | |
| − | Text = " N0= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 99 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Fusing(stellwert , "#.###")
| + | |
| − | Text = " SW= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 108 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Str(gyro_nick )
| + | |
| − | Text = " GN= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 117 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Str(ta )
| + | |
| − | Text = " TA= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 126 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Text = Str(k_sum)
| + | |
| − | Text = "Ksum= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 135 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Case 2 'Min/Max
| + | |
| − | 'If Dateiaktuell = 1 Then
| + | |
| − | ' If Porte.7 = 0 Then Activate_sd_bus
| + | |
| − | ' Close #2
| + | |
| − | ' Dateiaktuell = 0
| + | |
| − | 'End If
| + | |
| − | 'If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | | + | |
| − | If Pind.0 = 0 Then
| + | |
| − | Waitms 3
| + | |
| − | If Pind.0 = 0 Then
| + | |
| − | While Pind.0 = 0 : Wend
| + | |
| − | Minmax 'Min-Maxwerte auf 0 setzen
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | Singdummy = Umin / 100
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " Umin= " + Text
| + | |
| − | Text = Text + "V"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 9 , 1 , 1 , 1 , Black , White
| + | |
| − | Singdummy = Umax / 100
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " Umax= " + Text
| + | |
| − | Text = Text + "V"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 18 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Singdummy = Imin / 100
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " Imin= " + Text
| + | |
| − | Text = Text + "A"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 27 , 1 , 1 , 1 , Black , White
| + | |
| − | Singdummy = Imax / 100
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " Imax= " + Text
| + | |
| − | Text = Text + "A"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 36 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Singdummy = Kmhmin / 10
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " Vmin= " + Text
| + | |
| − | Text = Text + "km/h"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 45 , 1 , 1 , 1 , Black , White
| + | |
| − | Singdummy = Kmhmax / 10
| + | |
| − | Text = Fusing(Singdummy , "#.#")
| + | |
| − | Text = " Vmax= " + Text
| + | |
| − | Text = Text + "km/h"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 54 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Str(mlmin )
| + | |
| − | Text = " Plmin= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 63 , 1 , 1 , 1 , Black , White
| + | |
| − | Text = Str(mlmax )
| + | |
| − | Text = " Plmax= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 72 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Str(mlmin )
| + | |
| − | Text = " Prmin= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 81 , 1 , 1 , 1 , Black , White
| + | |
| − | Text = Str(mrmax )
| + | |
| − | Text = " Prmax= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 90 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Str(tamax )
| + | |
| − | Text = " TAmax= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 99 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Bin(hauptstportc)
| + | |
| − | Text = " HauptSt_C= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 108 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Bin(hauptstporta)
| + | |
| − | Text = " HauptSt_A= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 118 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Str(ad0)
| + | |
| − | Text = " AD(0)= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 127 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Str(ad1)
| + | |
| − | Text = " AD(1)= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 136 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Dummybyte = Fussschalter And &H1
| + | |
| − | If Dummybyte > 0 Then
| + | |
| − | Text = "1"
| + | |
| − | Else
| + | |
| − | Text = "0"
| + | |
| − | End If
| + | |
| − | Text = " Fuss1= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 145 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Dummybyte = Fussschalter And &H2
| + | |
| − | If Dummybyte > 0 Then
| + | |
| − | Text = "1"
| + | |
| − | Else
| + | |
| − | Text = "0"
| + | |
| − | End If
| + | |
| − | Text = " Fuss2= " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 153 , 1 , 1 , 1 , Black , White
| + | |
| − | | + | |
| − | Case 3 'Werte editieren
| + | |
| − | 'If Dateiaktuell = 1 Then
| + | |
| − | ' If Porte.7 = 0 Then Activate_sd_bus
| + | |
| − | ' Close #2
| + | |
| − | ' Dateiaktuell = 0
| + | |
| − | 'End If
| + | |
| − | 'If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | | + | |
| − | If Pind.7 = 0 Then 'Zeile abwärts
| + | |
| − | Waitms 3
| + | |
| − | If Pind.7 = 0 Then
| + | |
| − | While Pind.7 = 0 : Wend
| + | |
| − | If Editzeile > 1 Then Decr Editzeile : End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Pind.4 = 0 Then 'Zeile aufwärts
| + | |
| − | Waitms 3
| + | |
| − | If Pind.4 = 0 Then
| + | |
| − | While Pind.4 = 0 : Wend
| + | |
| − | If Editzeile < 7 Then Incr Editzeile : End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Ping.1 = 0 Then 'Zahl dekrementieren
| + | |
| − | Waitms 3
| + | |
| − | If Ping.1 = 0 Then
| + | |
| − | While Ping.1 = 0 : Wend
| + | |
| − | Select Case Editzeile
| + | |
| − | Case 1
| + | |
| − | Decr Pfaktor
| + | |
| − | Case 2
| + | |
| − | Decr Ifaktor
| + | |
| − | Case 3
| + | |
| − | Decr Dfaktor
| + | |
| − | Case 4
| + | |
| − | Decr Mpfaktor
| + | |
| − | Case 5
| + | |
| − | Decr Mvfaktor
| + | |
| − | Case 6
| + | |
| − | Decr Mplfaktor
| + | |
| − | Case 7
| + | |
| − | Decr Mvlfaktor
| + | |
| − | End Select
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Pind.5 = 0 Then 'Zahl inkrementieren
| + | |
| − | Waitms 3
| + | |
| − | If Pind.5 = 0 Then
| + | |
| − | While Pind.5 = 0 : Wend
| + | |
| − | Select Case Editzeile
| + | |
| − | Case 1
| + | |
| − | Incr Pfaktor
| + | |
| − | Case 2
| + | |
| − | Incr Ifaktor
| + | |
| − | Case 3
| + | |
| − | Incr Dfaktor
| + | |
| − | Case 4
| + | |
| − | Incr Mpfaktor
| + | |
| − | Case 5
| + | |
| − | Incr Mvfaktor
| + | |
| − | Case 6
| + | |
| − | Incr Mplfaktor
| + | |
| − | Case 7
| + | |
| − | Incr Mvlfaktor
| + | |
| − | End Select
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Ping.0 = 0 Then 'Werte aus Display übernehmen
| + | |
| − | Waitms 3
| + | |
| − | If Ping.0 = 0 Then
| + | |
| − | While Ping.0 = 0 : Wend
| + | |
| − | P_faktor = Pfaktor
| + | |
| − | P_faktor = P_faktor / 10000
| + | |
| − | | + | |
| − | I_faktor = Ifaktor
| + | |
| − | I_faktor = I_faktor / 1000000
| + | |
| − | | + | |
| − | D_faktor = Dfaktor
| + | |
| − | D_faktor = D_faktor / 1000
| + | |
| − | | + | |
| − | Mp_faktor = Mpfaktor
| + | |
| − | Mp_faktor = Mp_faktor / 10000
| + | |
| − | | + | |
| − | Mv_faktor = Mvfaktor
| + | |
| − | Mv_faktor = Mv_faktor / 1000
| + | |
| − | | + | |
| − | Mpl_faktor = Mplfaktor
| + | |
| − | Mpl_faktor = Mpl_faktor / 10000
| + | |
| − | | + | |
| − | Mvl_faktor = Mvlfaktor
| + | |
| − | Mvl_faktor = Mvl_faktor / 1000
| + | |
| − | | + | |
| − | Sichern = 1
| + | |
| − | Call Lcd_cls
| + | |
| − | Lcd_print Titel , 0 , 0 , 1 , 1 , 1 , Yellow , Blue
| + | |
| − | Wait 2
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | | + | |
| − | Text = " Regelparameter:"
| + | |
| − | Text = Trimtext(text)
| + | |
| − | Lcd_print Text , 0 , 18 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | Text = Str(pfaktor)
| + | |
| − | Text = " P = " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | If Editzeile = 1 Then
| + | |
| − | Lcd_print Text , 0 , 36 , 1 , 1 , 1 , Black , Green
| + | |
| − | '**************************************************
| + | |
| − | Else
| + | |
| − | Lcd_print Text , 0 , 36 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | End If
| + | |
| − | Text = Str(ifaktor)
| + | |
| − | Text = " I = " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | If Editzeile = 2 Then
| + | |
| − | Lcd_print Text , 0 , 46 , 1 , 1 , 1 , Black , Green
| + | |
| − | '**************************************************
| + | |
| − | Else
| + | |
| − | Lcd_print Text , 0 , 46 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | End If
| + | |
| − | Text = Str(dfaktor)
| + | |
| − | Text = " D = " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | If Editzeile = 3 Then
| + | |
| − | Lcd_print Text , 0 , 56 , 1 , 1 , 1 , Black , Green
| + | |
| − | '**************************************************
| + | |
| − | Else
| + | |
| − | Lcd_print Text , 0 , 56 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | End If
| + | |
| − | Text = Str(mpfaktor)
| + | |
| − | Text = " MP = " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | If Editzeile = 4 Then
| + | |
| − | Lcd_print Text , 0 , 66 , 1 , 1 , 1 , Black , Green
| + | |
| − | '**************************************************
| + | |
| − | Else
| + | |
| − | Lcd_print Text , 0 , 66 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | End If
| + | |
| − | Text = Str(mvfaktor)
| + | |
| − | Text = " MV = " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | If Editzeile = 5 Then
| + | |
| − | Lcd_print Text , 0 , 76 , 1 , 1 , 1 , Black , Green
| + | |
| − | '**************************************************
| + | |
| − | Else
| + | |
| − | Lcd_print Text , 0 , 76 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | End If
| + | |
| − | Text = Str(mplfaktor)
| + | |
| − | Text = " MPL = " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | If Editzeile = 6 Then
| + | |
| − | Lcd_print Text , 0 , 86 , 1 , 1 , 1 , Black , Green
| + | |
| − | '**************************************************
| + | |
| − | Else
| + | |
| − | Lcd_print Text , 0 , 86 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | End If
| + | |
| − | Text = Str(mvlfaktor)
| + | |
| − | Text = " MVL = " + Text
| + | |
| − | Text = Trimtext(text)
| + | |
| − | If Editzeile = 7 Then
| + | |
| − | Lcd_print Text , 0 , 96 , 1 , 1 , 1 , Black , Green
| + | |
| − | '**************************************************
| + | |
| − | Else
| + | |
| − | Lcd_print Text , 0 , 96 , 1 , 1 , 1 , Black , White
| + | |
| − | '**************************************************
| + | |
| − | End If
| + | |
| − | If Transferok = 1 Then
| + | |
| − | Lcd_print " Transfer OK" , 0 , 106 , 1 , 1 , 1 , Black , White
| + | |
| − | Transferok = 0
| + | |
| − | End If
| + | |
| − | '(
| + | |
| − | Case 4 'Logging
| + | |
| − | If Porte.7 = 0 Then Activate_sd_bus
| + | |
| − | If Antriebaus = 0 Then 'Motoren laufen ->Werte Loggen
| + | |
| − | If Dateiaktuell = 0 Then 'Keine Datei geöffnet
| + | |
| − | Lname = 1
| + | |
| − | Dateilaenge = 1 'Nächste Schleife einmal erzwingen
| + | |
| − | While Dateilaenge > 0
| + | |
| − | Dateiname = Str(lname)
| + | |
| − | Dateiname = Dateiname + ".log"
| + | |
| − | '0 voranstellen, damit sich die Dateien besser sortieren lassen.
| + | |
| − | While Len(dateiname) < 12
| + | |
| − | Dateiname = "0" + Dateiname
| + | |
| − | Wend
| + | |
| − | Dateilaenge = Filelen(dateiname)
| + | |
| − | Incr Lname
| + | |
| − | Wend
| + | |
| − | If Porte.7 = 1 Then call Activate_display_bus
| + | |
| − | Lcd_print Dateiname , 25 , 75 , 1 , 1 , 1 , Black , White
| + | |
| − | If Porte.7 = 0 Then Activate_sd_bus
| + | |
| − | Dateiaktuell = 1
| + | |
| − | Loopcount = 0
| + | |
| − | _sec = 0
| + | |
| − | _min = 0
| + | |
| − | _hour = 0
| + | |
| − | Zeit = "00:00:00"
| + | |
| − | Open Dateiname For Append As #2
| + | |
| − | Logtext = "Zeit;Loopcount;U;I;Nick;GyroNick;Stellwert;Roll;Pl;Pr;Ksum;V"
| + | |
| − | Print #2 , Logtext
| + | |
| − | End If
| + | |
| − | If Loopcount <> Aloopcount Then
| + | |
| − | Ulog = U / 100
| + | |
| − | Ilog = I / 100
| + | |
| − | Kmhlog = Kmh / 10
| + | |
| − | Logtext = Zeit
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Str(loopcount)
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Fusing(ulog , "#.#")
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Fusing(ilog , "#.#")
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Str(mit_acc_y)
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Str(gyro_nick)
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Fusing(stellwert , "#.###")
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Str(mit_acc_x)
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Str(ml)
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Str(mr)
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Fusing(k_sum , "#.##")
| + | |
| − | Logtext = Logtext + ";"
| + | |
| − | Logtext = Logtext + Fusing(kmhlog , "#.#")
| + | |
| − | Print #2 , Logtext
| + | |
| − | Aloopcount = Loopcount
| + | |
| − | End If
| + | |
| − | Else
| + | |
| − | Close #2
| + | |
| − | Dateiaktuell = 0
| + | |
| − | End If
| + | |
| − | ')
| + | |
| − | End Select
| + | |
| − | Loop
| + | |
| − | | + | |
| − | '***************************************************************************
| + | |
| − | Datenempfang:
| + | |
| − | !PUSH R24;
| + | |
| − | !IN R24, SREG;
| + | |
| − | !PUSH R24;
| + | |
| − | !LDS R24,{EP1}
| + | |
| − | !STS {EP0},R24
| + | |
| − | !LDS R24,{EP2}
| + | |
| − | !STS {EP1},R24
| + | |
| − | !LDS R24,{EP3}
| + | |
| − | !STS {EP2},R24
| + | |
| − | !LDS R24,{EP4}
| + | |
| − | !STS {EP3},R24
| + | |
| − | !LDS R24,{EP5}
| + | |
| − | !STS {EP4},R24
| + | |
| − | !IN R24,UDR1
| + | |
| − | !STs {EP5},R24
| + | |
| − | !POP R24;
| + | |
| − | !Out Sreg , R24;
| + | |
| − | !POP R24;
| + | |
| − | | + | |
| − | 'BCC prüfen
| + | |
| − | If Ep0 = 13 Then
| + | |
| − | If Ep5 = 13 Then
| + | |
| − | !lds R24,{EP1}
| + | |
| − | !LDs R25,{EP2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{EP3}
| + | |
| − | !add R24,R25
| + | |
| − | !STS {Bdummy},R24
| + | |
| − | If Bdummy = Ep4 Then 'Die Prüfsumme stimmt
| + | |
| − | '< Serielle Telegramme abarbeiten>
| + | |
| − | Select Case Index 'Telegrammnummer
| + | |
| − | Case 1 'Spannung
| + | |
| − | U = Iwert
| + | |
| − | Case 2 'Strom
| + | |
| − | I = Iwert
| + | |
| − | Case 3 'km/h
| + | |
| − | Kmh = Iwert
| + | |
| − | Case 4 'Ta und Antriebaus
| + | |
| − | Antriebaus = Ep2
| + | |
| − | Ta = Ep3
| + | |
| − | Case 5 'Akkuprozente
| + | |
| − | Akkuprozente = Iwert
| + | |
| − | Case 6 'Kilometer
| + | |
| − | Kilometer = Wwert
| + | |
| − | Case 7 'Meter
| + | |
| − | Meter = Iwert
| + | |
| − | Case 8 'Roll_l
| + | |
| − | Maccx1 = Ep2
| + | |
| − | Maccx2 = Ep3
| + | |
| − | Case 9 'Roll_h
| + | |
| − | Maccx3 = Ep2
| + | |
| − | Maccx4 = Ep3
| + | |
| − | Mit_acc_x = Maccx
| + | |
| − | Case 10 'Nick_l
| + | |
| − | Maccy1 = Ep2
| + | |
| − | Maccy2 = Ep3
| + | |
| − | Case 11 'Nick_h
| + | |
| − | Maccy3 = Ep2
| + | |
| − | Maccy4 = Ep3
| + | |
| − | Mit_acc_y = Maccy
| + | |
| − | Case 12 'Null_Roll_l
| + | |
| − | Nullx1 = Ep2
| + | |
| − | Nullx2 = Ep3
| + | |
| − | Case 13 'Null_Roll_h
| + | |
| − | Nullx3 = Ep2
| + | |
| − | Nullx4 = Ep3
| + | |
| − | Null_x = Nullx
| + | |
| − | Case 14 'Null_Nick_l
| + | |
| − | Nully1 = Ep2
| + | |
| − | Nully2 = Ep3
| + | |
| − | Case 15 'Null_Nick_h
| + | |
| − | Nully3 = Ep2
| + | |
| − | Nully4 = Ep3
| + | |
| − | Null_y = Nully
| + | |
| − | Case 16
| + | |
| − | Sw1 = Ep2
| + | |
| − | Sw2 = Ep3
| + | |
| − | Case 17
| + | |
| − | Sw3 = Ep2
| + | |
| − | Sw4 = Ep3
| + | |
| − | Stellwert = Sw
| + | |
| − | Case 18
| + | |
| − | Gyronick1 = Ep2
| + | |
| − | Gyronick2 = Ep3
| + | |
| − | Case 19
| + | |
| − | Gyronick3 = Ep2
| + | |
| − | Gyronick4 = Ep3
| + | |
| − | Gyro_nick = Gyronick
| + | |
| − | Case 20
| + | |
| − | Kksum1 = Ep2
| + | |
| − | Kksum2 = Ep3
| + | |
| − | Case 21
| + | |
| − | Kksum3 = Ep2
| + | |
| − | Kksum4 = Ep3
| + | |
| − | K_sum = Kksum
| + | |
| − | Case 255
| + | |
| − | '(
| + | |
| − | If Sichern = 1 Then
| + | |
| − | 'BCC berechnen
| + | |
| − | !lds R24,{P_f1}
| + | |
| − | !LDs R25,{P_f2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{P_f3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{P_f4}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{I_f1}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{I_f2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{I_f3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{I_f4}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{D_f1}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{D_f2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{D_f3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{D_f4}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mp_f1}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mp_f2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mp_f3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mp_f4}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mv_f1}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mv_f2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mv_f3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mv_f4}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mpl_f1}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mpl_f2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mpl_f3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mpl_f4}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mvl_f1}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mvl_f2}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mvl_f3}
| + | |
| − | !add R24,R25
| + | |
| − | !LDs R25,{Mvl_f4}
| + | |
| − | !add R24,R25
| + | |
| − | !STS {Bdummy},R24
| + | |
| − | | + | |
| − | Open "COM2:" For Binary As #1 'auf SD-Karte speichern
| + | |
| − | Print #1 , Chr(p_f1) ; Chr(p_f2) ; Chr(p_f3) ; Chr(p_f4);
| + | |
| − | Print #1 , Chr(i_f1) ; Chr(i_f2) ; Chr(i_f3) ; Chr(i_f4);
| + | |
| − | Print #1 , Chr(d_f1) ; Chr(d_f2) ; Chr(d_f3) ; Chr(d_f4);
| + | |
| − | Print #1 , Chr(mp_f1) ; Chr(mp_f2) ; Chr(mp_f3) ; Chr(mp_f4);
| + | |
| − | Print #1 , Chr(mv_f1) ; Chr(mv_f2) ; Chr(mv_f3) ; Chr(mv_f4);
| + | |
| − | Print #1 , Chr(mpl_f1) ; Chr(mpl_f2) ; Chr(mpl_f3) ; Chr(mpl_f4);
| + | |
| − | Print #1 , Chr(mvl_f1) ; Chr(mvl_f2) ; Chr(mvl_f3) ; Chr(mvl_f4);
| + | |
| − | Print #1 , Chr(bdummy) ; Chr(13);
| + | |
| − | Close #1
| + | |
| − | Transferok = 1
| + | |
| − | Sichern = 0
| + | |
| − | End If
| + | |
| − | ')
| + | |
| − | Case 76 'Linker Motor
| + | |
| − | Ml = Ep3
| + | |
| − | If Ep2 = 0 Then Ml = Ml * -1
| + | |
| − | Incr Loopcount
| + | |
| − | Case 82 'Rechter Motor
| + | |
| − | Mr = Ep3
| + | |
| − | If Ep2 = 0 Then Mr = Mr * -1
| + | |
| − | End Select
| + | |
| − | | + | |
| − | If Modus = 2 Then
| + | |
| − | Select Case Index
| + | |
| − | Case 36 'Port a und C Status
| + | |
| − | Hauptstportc = Ep2
| + | |
| − | Hauptstporta = Ep3
| + | |
| − | Case 37 'Fussschalter 1
| + | |
| − | Ad0 = Wwert
| + | |
| − | Case 38 'Fussschalter 2
| + | |
| − | Ad1 = Wwert
| + | |
| − | Case 39 'Fussschalter gesamt
| + | |
| − | Fussschalter = Ep2
| + | |
| − | End Select
| + | |
| − | End If
| + | |
| − | | + | |
| − | If Modus < 3 Then
| + | |
| − | Select Case Index
| + | |
| − | Case 22
| + | |
| − | P_f1 = Ep2
| + | |
| − | P_f2 = Ep3
| + | |
| − | Case 23
| + | |
| − | P_f3 = Ep2
| + | |
| − | P_f4 = Ep3
| + | |
| − | Case 24
| + | |
| − | I_f1 = Ep2
| + | |
| − | I_f2 = Ep3
| + | |
| − | Case 25
| + | |
| − | I_f3 = Ep2
| + | |
| − | I_f4 = Ep3
| + | |
| − | Case 26
| + | |
| − | D_f1 = Ep2
| + | |
| − | D_f2 = Ep3
| + | |
| − | Case 27
| + | |
| − | D_f3 = Ep2
| + | |
| − | D_f4 = Ep3
| + | |
| − | Case 28
| + | |
| − | Mp_f1 = Ep2
| + | |
| − | Mp_f2 = Ep3
| + | |
| − | Case 29
| + | |
| − | Mp_f3 = Ep2
| + | |
| − | Mp_f4 = Ep3
| + | |
| − | Case 30
| + | |
| − | Mv_f1 = Ep2
| + | |
| − | Mv_f2 = Ep3
| + | |
| − | Case 31
| + | |
| − | Mv_f3 = Ep2
| + | |
| − | Mv_f4 = Ep3
| + | |
| − | Case 32
| + | |
| − | Mpl_f1 = Ep2
| + | |
| − | Mpl_f2 = Ep3
| + | |
| − | Case 33
| + | |
| − | Mpl_f3 = Ep2
| + | |
| − | Mpl_f4 = Ep3
| + | |
| − | Case 34
| + | |
| − | Mvl_f1 = Ep2
| + | |
| − | Mvl_f2 = Ep3
| + | |
| − | Case 35
| + | |
| − | Mvl_f3 = Ep2
| + | |
| − | Mvl_f4 = Ep3
| + | |
| − | End Select
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | End If
| + | |
| − | '</Serielle Telegramme abarbeiten>
| + | |
| − | Return
| + | |
| − | '******************************************************************************
| + | |
| − | | + | |
| − | Sub Activate_display_bus:
| + | |
| − | 'remove SD Card from bus, must be "Reset PortF.7" for board D071x
| + | |
| − | 'Reset Porte.7
| + | |
| − | 'different to what the SD card needs
| + | |
| − | 'Config Spi = Hard , Interrupt = Off , Data Order = Msb , Master = Yes , Polarity = Low , Phase = 0 , Clockrate = 4 , Noss = 1
| + | |
| − | 'Set Spsr.spi2x 'hidden parameter: doubles the speed of the SPI output
| + | |
| − | 'Spiinit
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Sub Activate_sd_bus
| + | |
| − | 'Deactivate Display
| + | |
| − | 'Set Lcd_port.lcd_cs
| + | |
| − | 'different to what the display needs
| + | |
| − | 'Config Spi = Hard , Interrupt = Off , Data Order = Msb , Master = Yes , _
| + | |
| − | ' Polarity = High , Phase = 1 , Clockrate = 4 , Noss = 1
| + | |
| − | 'no double speed. You may remove this line to try out with your card.
| + | |
| − | 'It may work.
| + | |
| − | 'Reset Spsr.spi2x
| + | |
| − | 'Spiinit
| + | |
| − | 'connects SD Card to bus, must to be "Set PortF.7" for board D071x
| + | |
| − | 'Set Porte.7
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Function Trimtext(t As String) As String
| + | |
| − | If Len(t) > 22 Then T = Left(t , 22)
| + | |
| − | While Len(t) < 22 : T = T + " " : Wend
| + | |
| − | End Function
| + | |
| − | | + | |
| − | Sub Minmax
| + | |
| − | Umin = 10000
| + | |
| − | Umax = -10000
| + | |
| − | Imin = 0
| + | |
| − | Imax = 0
| + | |
| − | Kmhmin = 0
| + | |
| − | Kmhmax = 0
| + | |
| − | Mlmax = 0
| + | |
| − | Mlmin = 0
| + | |
| − | Mrmax = 0
| + | |
| − | Mrmin = 0
| + | |
| − | Tamax = 0
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | Tick:
| + | |
| − | Incr _sec
| + | |
| − | If _sec > 59 Then
| + | |
| − | _sec = 0
| + | |
| − | Incr _min
| + | |
| − | End If
| + | |
| − | | + | |
| − | If _min > 59 Then
| + | |
| − | _min = 0
| + | |
| − | Incr _hour
| + | |
| − | End If
| + | |
| − | | + | |
| − | Zeit = Time$
| + | |
| − | Return
| + | |
| − | | + | |
| − | Getdatetime:
| + | |
| − | Return
| + | |
| − | | + | |
| − | Sub Drawpagestatics
| + | |
| − | Call Lcd_print(titel , 0 , 0 , 1 , 1 , 1 , Yellow , Blue)
| + | |
| − | Select Case Modus
| + | |
| − | Case 0
| + | |
| − | Lcd_rect 8 , 84 , 124 , 95 , 0 , Black 'Rahmen für Akku Balken
| + | |
| − | Lcd_rect 24 , 125 , 124 , 135 , 0 , Black 'Rahmen für Horizontal Lenker
| + | |
| − | Lcd_rect 8 , 100 , 19 , 160 , 0 , Black 'Rahmen für Vertikal Lenker
| + | |
| − | Lcd_draw 20 , 130 , 22 , 130 , 0 , Black 'Vertikaler Balken, Mitteltick
| + | |
| − | Lcd_draw 74 , 136 , 74 , 138 , 0 , Black 'Horizontaler Balken, Mitteltick
| + | |
| − | Lcd_draw 0 , 167 , 132 , 167 , 0 , Black 'Hintergrund der Fußzeile
| + | |
| − | Case 4
| + | |
| − | Call Lcd_print( "LOGGING" , 30 , 40 , 2 , 1 , 2 , Black , White)
| + | |
| − | Dateiaktuell = 0
| + | |
| − | End Select
| + | |
| − | End Sub
| + | |
| − | | + | |
| − | End
| + | |
| | | | |
| − | $include "Y:\Programme\Tools\BASCOM-AVR\Display 3000\Displaymodul\Bascom Programme\für Include\GLCD21_display3000.bas"
| + | ''Hauptsteuerung.bas (BASCOM)'' [http://www.listrik.de/html/freeware.html] |
| − | $include "Y:\Programme\Tools\BASCOM-AVR\Display 3000\Displaymodul\Bascom Programme\für Include\GLCD21_fonts.bas"
| + | |
| | | | |
| − | Colortable:
| + | ''Display3000.bas (BASCOM)'' [http://www.listrik.de/html/freeware.html] |
| − | Data 0
| + | |
| − | </pre>
| + | |
| | | | |
| | [[Kategorie:Microcontroller]] | | [[Kategorie:Microcontroller]] |
Beim Listrik01 handelt es sich um einen selbstbalancierenden Elektroroller. Die Elektronik basiert auf den Veröffentlichungen des Rutscherle 2 [1]. Die Schaltung wurde verändert um I2C Gyro und Accelerometer anschließen zu können. Die Listing wurden außerdem umfangreicher kommentiert.
Der Prototyp fährt mit einem 24V / 500W Gleichstrommotor. Das Gefährt ist allerdings extrem koflastig, deshalb baue ich es um auf einen 48V/1000W BLDC Motor. Vom Hersteller in China direkt importiert. Das Bild oben zeigt den GS-Prototyp. Bei der BLDC Variante werden Batterie, Steuerung und Motor in die Felge integriert. Dies sorgt für einen niedrigen Schwerkunkt. Habe mir ein 18" Motorrad Hinterrad besorgt in das alles integriert wird.
Die Sensorik wurde um 3 weitere Hallsensoren erweitert um einen Trigger je 60 Grad elektrisch zu bekommen. Die Geschwindigkeit ist auf 20km/h begrenzt.
Der Gleichstrom Prototyp fährt mit 2 Bleiakkus mit 12V/7AH in Reihe geschaltet. Sie sind für Motoren und Elektronik. Die Entscheidung für Bleiakkus wurde bewusst getroffen. Bei einem Prototyp sind Ergebnisse wichtiger als Eleganz.
Der BLDC Prototyp fährt mit 4 Bleiakkus mit 12V/7AH in Reihe geschaltet. Sie sind für Motoren und Elektronik.
Motorregler mit Atmega 168A sowie eine Hauptsteuerung mit einem Atmega 644PA. Ein Display von Display3000 als Tacho (und Datenlogger). Siehe Stückliste.
Die Software ist in Basic mit BASCOM geschrieben. Zeitkritische Teile in Assembler.
Siehe Link oben zum Rutscherle 2 [2].
Kippt das Fahrzeug nach vorn, wird nach vorn beschleunigt und umgekehrt. Die Regelung erledigt ein PID-Regler. Danach kommen jedoch noch einige zusätzliche Faktoren die z.B. die Motorkennlinie ausgleichen sowie ungewollte Richtungsänderungen bei unebenen Oberflächen reduzieren. Ähnlich aufwändig wird es bei den Motorreglern. Eine reine Blockkommutierung, wie bei solchen Motoren üblich, ist auf unebenen Untergründen suboptimal. Hier wurde zusätzliche Hallsensoren installiert.
Die seitliche Stabilität garantiert der Kreiseleffekt den jeder vom Fahrrad kennt. Das endgültige Fahrzeug wird eine Lenkung bekommen, die auf dem Beharrungsmoment basiert. Eine konventionelle Lenkung ist nicht möglich weil es nur ein Rad gibt.
Der Motorcontroller regelt den Motor, misst und übermittelt der Motorregler auch Spannung, Strom und Fahrstrecke. Die Temperatur des Kühlkörpers wird ebenfalls gemessen und wenn nötig ein Lüfter zugeschaltet. Die Einheit wird vom PC aus über eine ISP Schnittstelle programmiert.
Der Motorregler ist auf einer doppelseitigen Platine aufgebaut. Die Verbindung zwischen den beiden Platinen bildet ein 10-adriges Flachkabel. Zusätzlich zu den beiden Platinen gehört zum Motorregler auch die im Motor verbaute Sensorplatine. Auf dieser werden die Signale der drei zusätzlichen Hallsensoren zu einem Signal zusammengefasst.
Die Hauptcontroller erledigt die Lageregelung. Sie steuert die Motoren und gibt die entsprechenden Meldungen an den Anzeigecontroller aus. Sie stellt auch die 12V für den Tacho bereit. Bei beiden Controllern wird ein Chopperspannungsregler eingesetzt der bis zu 63V verträgt. Deshalb ist eine Versorgung aus dem 24..48V Netz möglich. Die Lageregelung speichert auch die gefahrenen Km, einigen Min-Max Werte und diverse Werte bei einem Notaus. Diese Werte werden im EEprom als Text abgelegt. Beachten Sie, daß Sie das Gerät dann nur noch auf Privatgelände mit Zustimmung des Eigentümers benutzen dürfen. Eine Bertriebserlaubnis für das Gerät existiert nicht. Eine Einzelabnahme kann beim TÜV beantragt werden.
Im Unterschied zu ähnlichen Projekten besitzt dieses Fahrzeug einen über den I2C Bus gesteuerten Gyro und Accelerometer. Zum Beschleunigen und Bremsen werden die Sensoren gekippt.
Ich werde diese Seite updaten, je nach Fortschritt. Habe die nächsten paar Monate wenig Zeit....