Aus RN-Wissen.de

Jmb (Diskussion | Beiträge) (Robotino Hardware) |
Jmb (Diskussion | Beiträge) |
||
| Zeile 1: | Zeile 1: | ||
| − | Robotino ist ein Gerät von Festo. ([http://www.festo-didactic.com/int-de/lernsysteme/neu-robotino-lernen-mit-robotern/der-mobile-roboter.htm www.festo-didactic.com]) | + | [[Bild:Robo AP.jpg|right]] |
| + | Robotino ist ein Gerät von Festo. ([http://www.festo-didactic.com/int-de/lernsysteme/neu-robotino-lernen-mit-robotern/der-mobile-roboter.htm www.festo-didactic.com]) | ||
| − | Es hat einen Omniantrieb mit 3 [http://www.roboternetz.de/wissen/index.php/OmniWheels OmniWheels] (von Traporoll ?) | + | == Hardware == |
| − | und unter der Haube einen PC104 - mit Realtime Linux-Kernel | + | * Es hat einen Omniantrieb mit 3 [http://www.roboternetz.de/wissen/index.php/OmniWheels OmniWheels] (von Traporoll ?) |
| + | * und unter der Haube einen PC104 - mit Realtime Linux-Kernel und 256MB CF-Card als "Festplatte" | ||
| + | * Die 3 Motoren werden über eine Steuerplatine (im Bild grün) angesprochen und die Motoren geben über Sensoren Rückgabedaten zurück an den Controller | ||
| + | * Kommunikation per WLAN (AccessPoint von Level1) .[[Bild:Robotino_open.jpg|right]] | ||
| + | * Webcam per USB angeschlossen | ||
| + | * ich gehe per USB-Tastatur und VGA-Monitor direkt an den Robotino | ||
| + | * 9 Sensoren rundum, damit man den Abstand 360° erkennen kann und | ||
| + | * 1x Notabschalt-Bumper (1/0) Signal | ||
| + | * das ganze ist sehr Robust hergestellt (hält einiges aus ;-) | ||
| − | |||
| − | + | == Software == | |
| − | + | Festo Didactic hat eine Software namens [http://www.festo-didactic.com/int-de/lernsysteme/neu-robotino-lernen-mit-robotern/programmierung-mit-robotino-view.htm "Robotino View"] mit der man den Robotino programmieren soll, dass geht zwar sehr einfach aber alles geht eben nicht. Da nutze ich lieber C++. Dass geht Gott sei Danke ebenfalls (mit PuTTY etc.,...) dazu gibt es auch von der UNI München ein Praktikum und die Seite [http://www.openrobotino.org/ http://www.openrobotino.org/] für mehr C++ Informationen. <br\> | |
| + | Für den Anfänger: Per Tastatur (oben) lassen sich kleine DEMOs starten | ||
| − | + | == Für alle "Freaks" lässt sich Robotino noch Erweitern: == | |
| − | + | * 10 analoge Eingänge 0 – 10 V, 50 Hz | |
| − | + | * 8 digitale Ein- und Ausgänge (24 V, kurzschlussfest und Überlastschutz) | |
| + | * 2 Relais für zusätzliche Aktorik | ||
| + | * (und noch ein freier Motorkontoller ist unterm Gehäuse versteckt) | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | ---- | |
| − | + | ||
| + | Ggf. gibt es noch mehr Robotino Nutzer die hier Ihre Bilder / Erfahrungen ablegen ? | ||
| + | Mir macht's aufjedenfall Spass mit dem Gerät im Praktikum zu arbeiten (nur billig ist er nicht grad) | ||
Grüße | Grüße | ||
Markus | Markus | ||
| + | --[[Benutzer:Jmb|JMB]] 19:29, 16. Okt 2006 (CEST) | ||
Version vom 16. Oktober 2006, 19:29 Uhr

Robotino ist ein Gerät von Festo. (www.festo-didactic.com)
Hardware
- Es hat einen Omniantrieb mit 3 OmniWheels (von Traporoll ?)
- und unter der Haube einen PC104 - mit Realtime Linux-Kernel und 256MB CF-Card als "Festplatte"
- Die 3 Motoren werden über eine Steuerplatine (im Bild grün) angesprochen und die Motoren geben über Sensoren Rückgabedaten zurück an den Controller
- Kommunikation per WLAN (AccessPoint von Level1) .
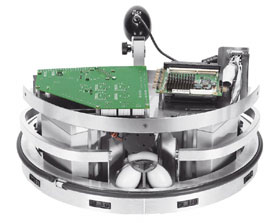
- Webcam per USB angeschlossen
- ich gehe per USB-Tastatur und VGA-Monitor direkt an den Robotino
- 9 Sensoren rundum, damit man den Abstand 360° erkennen kann und
- 1x Notabschalt-Bumper (1/0) Signal
- das ganze ist sehr Robust hergestellt (hält einiges aus ;-)

Software
Festo Didactic hat eine Software namens "Robotino View" mit der man den Robotino programmieren soll, dass geht zwar sehr einfach aber alles geht eben nicht. Da nutze ich lieber C++. Dass geht Gott sei Danke ebenfalls (mit PuTTY etc.,...) dazu gibt es auch von der UNI München ein Praktikum und die Seite http://www.openrobotino.org/ für mehr C++ Informationen. <br\> Für den Anfänger: Per Tastatur (oben) lassen sich kleine DEMOs starten
Für alle "Freaks" lässt sich Robotino noch Erweitern:
- 10 analoge Eingänge 0 – 10 V, 50 Hz
- 8 digitale Ein- und Ausgänge (24 V, kurzschlussfest und Überlastschutz)
- 2 Relais für zusätzliche Aktorik
- (und noch ein freier Motorkontoller ist unterm Gehäuse versteckt)
Ggf. gibt es noch mehr Robotino Nutzer die hier Ihre Bilder / Erfahrungen ablegen ? Mir macht's aufjedenfall Spass mit dem Gerät im Praktikum zu arbeiten (nur billig ist er nicht grad) Grüße Markus --JMB 19:29, 16. Okt 2006 (CEST)
