
Wenn man in Bezug auf unser Robotik-Hobby von Getriebemotoren spricht, meint man in erster Linie Gleichstrom-Getriebemotoren (DC-Motoren) wie sie zum Teil auch im Modellbau verwendet werden. Da die meisten Bastler doch kleinere Roboter konstruieren, die oft zwischen 2 und 10 kg wiegen, werden oft DC-Motoren im Spannungsbereich von 6 bis 12 V verwendet. In diesem Bereich gibt es natürlich unzählige Motoren aller Preisklassen und Hersteller. Da aber die Robotik-Bastelei nicht erst gestern erfunden wurde, haben sich bestimmte Motoren schon einen Namen gemacht. Sehr beliebte Typen sind zum Beispiel der Motor RB35 und Motoren von Bühler und Igarashi.
http://www.roboternetz.de/wiki/uploads/Main/rb35.jpg
{kind=link}
http://www.roboternetz.de/wiki/uploads/Main/igarashi.jpg
{kind=link}
Diese Motoren bekommt man mit unterschiedlichen Zahnrad-Untersetzungen, so dass man sowohl sehr flinke Roboter als auch recht starke aber langsame Roboter konstruieren kann. Durch die Wahl der Untersetzung kann auch eine optimale Anpassung an den geplanten Raddurchmesser erfolgen.
In diesem Zusammenhang empfehle ich folgende Berechnungsseite: http://www.roboternetz.de/phpBB2/motordrehmoment.php
Über diese Webseite kann man in etwa berechnen wie stark ein Motor sein muss und welche Geschwindigkeit bei unterschiedlichem Raddurchmesser und Untersetzung zu erwarten sind. Es ist ratsam vor der Konstruktion und vor dem Kauf des Motors ein wenig dort zu rechnen, ansonsten wundert man sich nachher vielleicht, wenn der Roboter kaum schneller als eine Schnecke ist oder aber wegen zu hoher Geschwindigkeit kaum noch steuerbar ist. Als Anhaltspunkt sei gesagt, dass Roboter-Motoren oft zwischen 5 und 50 Umdrehungen pro Minute schaffen, je nachdem wie groß das Rad ist. Je größer das Rad, desto weniger schnell muss sich der Motor drehen, versteht sich.
Inhaltsverzeichnis
Das Drehmoment
Die Kraft eines Motors wird durch das sogenannte Drehmoment angegeben. Beim Kauf sollte immer auf diese Angabe geachtet werden. Die Einheit Newton wird mit mNm bzw. Ncm abgekürzt. 100 Ncm entsprechen 1 mNm. Leider wird das Drehmoment von einigen Anbietern auch in ganz anderen Einheiten angegeben, was den Vergleich nicht immer einfach macht. Ein wenig habe ich den Verdacht, dass dies so mancher Anbieter auch deshalb so macht. Standard ist jedenfalls eindeutig Newton.
Das Drehmoment ist die Kraft mal den Weg. Ich möchte nun niemanden mit der ganzen Mathematik von meiner Webseite verscheuchen (ich mag die auch nicht), daher nur ein paar Beispiele:
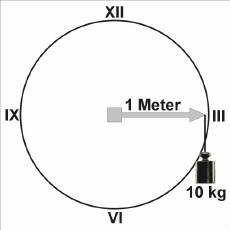
Wenn man an den Zeiger einer Turmuhr in der Stellung auf 3 Uhr ein Gewicht von 10 kg hängt, wirkt auf die Achse ein Drehmoment von 100 Nm (also 10000 Ncm). Ein Getriebemotor mit 100 Ncm könnte beispielsweise bei einem Hebel von 1 cm (an der Achse) noch 10 kg heben. Eine ganz schöne Leistung, nicht wahr?
http://www.roboternetz.de/bilder/kirchturmuhr_150dpi.jpg
{kind=link}
Kleinere Getriebemotoren (3-10 cm Länge) haben oft eine maximale Kraft von 5–60 Ncm hinter dem Getriebe. Vor einem Getriebe sind es je nach Untersetzungsfaktor oft nur 0,5 bis 3 Ncm. Die Hersteller geben manchmal das Drehmoment vor und manchmal nach dem Getriebe an. Hier kommt es daher immer wieder zu Verwechslungen, also immer gut aufpassen. In der Regel reicht ein Getriebemotor wie der RB-35 mit ca. 0,6 Ncm (vor Getriebe mit großer Untersetzung z.B. 1:100 oder 1:200) für kleine Roboter fast immer aus. Bei einer Untersetzung 1:100 sind das immerhin fast 40 Ncm. Noch kleinere Roboter können auch mit Servos angetrieben werden. Einige Bastler haben herausgefunden, dass man Servos mit etwas Geschick auseinandernehmen kann und mit wenig Aufwand so austricksen kann, dass diese als ganz normale Motoren arbeiten (also 360 Grad Volldrehungen machen können). Allerdings reichen Servos aufgrund der Plastikzahnräder wirklich nur für Kleinstroboter (siehe auch unter Servos).
http://www.roboternetz.de/wiki/uploads/Main/servo.jpg
{kind=link}
Seit kurzem gibt es für kleinere Roboter auch eine Alternative zu Servos, nämlich einen Modellbau-Twin-Motor. Eigentlich sind es zwei getrennte Motoren mit zwei Getrieben. Jedoch sind diese sehr kompakt zu einem leicht montierbaren Modul zusammengefasst worden. Dadurch lassen sich sehr einfach sehr schmale Roboter konstruieren.
http://www.roboternetz.de/bilder/twinmotor.gif
{kind=link}
Für größere Roboter ab 5 kg aufwärts braucht man schon recht starke Getriebemotoren. Hier bieten sich dann als preiswerte Lösung auch Scheibenwischermotoren vom Schrotthandel an. Diese können dann auch Roboter über 10 oder 20 kg problemlos bewegen. Allerdings sollte man immer auch den Strombedarf im Auge haben! Keine Sorge, auch Scheibenwischermotoren drehen sich wie normale Motoren um 360 Grad. Die Hin- und Herbewegung der Scheibenwischer wird in der Regel über ein Gestänge erreicht und hat nichts mit dem Motor zu tun.
http://www.roboternetz.de/bilder/G310233.jpg
{kind=link}
Vor- und Nachteile von Getriebemotoren
Getriebemotoren haben zwar den Vorteil, dass sie recht günstig, recht klein und recht einfach anzusteuern sind. Die Richtungsumkehr ist durch einfaches Umpolen ebenfalls kein Problem. Aber sie haben auch Nachteile. Ein Roboter, der sich in einer Umgebung haargenau zurecht finden soll, muss kerzengerade und auch Kurven in genau definiertem Winkel fahren können. Dies ist mit Getriebemotoren nicht so einfach, denn die Motoren bleiben ja nicht sofort stehen, wenn die Spannung abgeschaltet wird. Je kleiner die Untersetzung, desto mehr laufen die Roboter nach dem Ausschalten noch nach. Zudem drehen sie sich je nach Bodenbeschaffenheit mal langsamer und mal schneller. Der Roboter weiss also nie genau wieviel Umdrehungen das Rad nun eigentlich wirklich gemacht hat. Diesen Nachteil muss man mit Sensoren (Drehgeber, Gabellichtschranken etc.) ausgleichen. Am Rad muss also ein Sensor angebracht werden, welcher bei Bewegung des Rades Impulse an den Microcontroller sendet. Der Microcontroller muss also ständig prüfen, wie weit sich ein Rad bewegt hat. Schon die Geradeausfahrt wird ein extrem kompliziertes Steuerungsproblem. Denn alle Motoren unterliegen ja Toleranzen und drehen bei gleicher Spannung nie genauso schnell. Um geradeaus zu fahren, muss also immer ein Motor gebremst und ein anderer beschleunigt werden. Das Ganze muss so schnell kontrolliert und gesteuert werden, dass es dem Beobachter gar nicht auffällt. Zwar lässt sich dies alles mit Software oder auch mit Hardware regeln, aber es ist doch ein ganz schöner Aufwand, insbesondere für Einsteiger. Daher bin ich kein großer Freund von Getriebemotoren als Roboter-Antrieb, wenn es wirklich um sehr genaue Positionierung geht. Ich favorisiere die sogenannten Schrittmotoren. Schrittmotoren gelten als recht kompliziert in der Ansteuerung und recht schwach. Das dies nicht der Fall ist, erläutere ich auf der Seite Schrittmotoren.
Ist eine 100% genaue Positionierung aber gar nicht so wichtig, dann ist man ohne Frage mit den Getriebemotoren sehr schnell am Ziel. Die meisten Roboter werden mit 2 Getriebemotoren und eine Art drehbarem Möbelrad konstruiert. Es gibt aber auch Allrad-Fahrzeuge, die gleich auf 4 Motoren setzen. Wie gesagt, im Auge sollte man immer auch den Strombedarf und das Akkugewicht haben.
Im Roboternetz gibt es eine Übersicht von besonders preiswerten und immer wieder verwendeten Getriebemotoren: http://www.roboternetz.de/motoruebersicht.html Diese Liste wird immer ergänzt, wenn es irgendwo wieder besondere Schnäppchen gibt.
Siehe auch
Weblinks
