
K |
K |
||
| (16 dazwischenliegende Versionen von 3 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
| − | Eine Begrenzungsschleife oder Induktionsschleife wird verwendet um den Arbeitsbereich eines Roboters festzulegen. Üblicherweise wird diese bei | + | Eine Begrenzungsschleife oder Induktionsschleife wird verwendet, um den Arbeitsbereich eines Roboters festzulegen. Üblicherweise wird diese bei Rasenmäherrobotern eingesetzt. Die Induktionsschleife wird dabei um die zu mähende Fläche verlegt. Ein Roboter kann auch entlang einer Induktionsschleife zur Ladestation geleitet werden. |
'''Funktionsprinzip:''' | '''Funktionsprinzip:''' | ||
| − | Als Induktionsschleife wird ein Kabel (Schaltlitze, Lautsprecherkabel) verlegt. Die Schleife entspricht damit einer Spule mit einer Windung. An die Induktionsschleife wird mit einer Frequenz von 5 bis 200 Hz für wenige ms (Impulsbreite) eine Spannung von etwa 15 - 25 V angelegt. Damit wird für kurze Zeit innerhalb der Schleife ein Magnetfeld erzeugt. Im Roboter wird als Detektor eine Spule mit hoher Windungszahl | + | Als Induktionsschleife wird ein Kabel (Schaltlitze, Lautsprecherkabel) verlegt. Die Schleife entspricht damit einer Spule mit einer Windung. An die Induktionsschleife wird mit einer Frequenz von 5 bis 200 Hz für wenige ms (Impulsbreite) eine Spannung von etwa 15 - 25 V angelegt. Damit wird für kurze Zeit innerhalb der Schleife ein Magnetfeld erzeugt. Im Roboter wird als Detektor eine Spule mit hoher Windungszahl verwendet. Der Anstieg des Magnetfeldes induziert in dieser Spule eine Spannung. Die Polarität gibt darüber Auskunft, ob sich die Spule innerhalb oder außerhalb der Schleife befindet. Befindet sich die Spule genau über der Schleife wird keine Spannung induziert. Der anschließende Abfall des Magnetfeldes induziert nochmals eine Spannung in der Detektorspule, deren Polarität aber dem ersten Impuls entgegengesetzt ist. |
| − | Entscheidend für die Funktion ist somit nicht das statische Magnetfeld. Hall-Sensoren als Detektoren sind damit ungeeignet. Entscheidend sind ein steiler Anstieg und steiler Abfall des Magnetfeldes, da nach dem | + | Entscheidend für die Funktion ist somit nicht das statische Magnetfeld. Hall-Sensoren als Detektoren sind damit ungeeignet. Entscheidend sind ein steiler Anstieg und steiler Abfall des Magnetfeldes, da nach dem Induktionsgesetz die Änderung der Magnetfeldstärke pro Zeiteinheit für die Höhe der induzierten Spannung entscheidend ist. Der Widerstand der Induktionsschleife sollte deshalb wenige Ohm nicht überschreiten. Wichtig ist auch die Polung der Schleife, wenn man die Anschlüsse vertauscht erkennen die Empfänger innerhalb der Schleife "außen" und umgekehrt. |
'''Senderschaltung:''' | '''Senderschaltung:''' | ||
| − | Die Ansteuerung des MOSFET T1 ist über beliebige Timer (NE555, Attiny2313) möglich. Wichtig sind ein Kondensator | + | Die Ansteuerung des MOSFET T1 ist über beliebige Timer (NE555, Attiny2313) möglich. Wichtig sind ein Kondensator C3 mit hoher Kapazität (1 bis 10 mF) zur Pufferung der Spannung am Netzgerät, da bei durchgeschaltetem MOSFET fast ein Kurzschluss über die Induktionsschleife vorliegt. Eine Freilaufdiode ist nicht erforderlich, um nach dem Abschalten der Spannung die Induktion von Spannungsspitzen am Netzteil und dem MOSFET zu verhindern. Hierfür reicht in der Regel die im MOSFET bereits eingebaute Diode. |
| − | [[Bild: | + | [[Bild:sender_109.gif]] |
| − | Für eine Impulsbreite von z.B. 2 ms und eine Frequenz von 5 Hz muss | + | Der Widerstand R5 muss etwas Leistung verkraften können, ein 4W-Typ ist sicher ausreichend. Mit P1 kann man die Impulsbreite einstellen, R3 bestimmt die Wiederholfrequenz. Für C3 sollte man einen LowESR Elko nehmen (oder einen mit höherer Nennspannung) damit er die Stromimpulse liefern kann. |
| + | |||
| + | Genauer einstellbar sind Impulsbreite und Wiederholfrequenz, wenn statt des NE555 ein Mikrocontroller verwendet wird. Für eine Impulsbreite von z.B. 2 ms und eine Frequenz von 5 Hz muss T1 über R1 2 ms auf Vcc (high) und 200 ms auf 0V (low) gesetzt werden. | ||
'''Empfangsschaltung:''' | '''Empfangsschaltung:''' | ||
| − | + | 1. Variante. Signalauswertung über Schmitt-Trigger | |
| − | + | ||
| + | [[Bild:EMP_DC.gif]] | ||
| − | + | Eine geeignete Detektorspule kann aus einem Relais (z.B. 12 - 24 V, Widerstand etwa 500 Ohm) ausgebaut werden. Der Bügel muss entfernt werden. Die Verstärkung der induzierten Spannung an der Detektorspule erfolgt über einen Operationsverstärker. Die Detektorspule liegt deshalb zwischen den beiden Eingängen des OP1. D1 und D2 begrenzen Spannungsspitzen, um den OPV zu schützen. P1 legt die Empfindlichkeit fest, R4 und R5 bilden eine virtuelle Masse. Wichtig ist auch die Polung der Spule, sonst zeigt der Empfänger innerhalb der Schleife "außen" an und umgekehrt. | |
| − | + | Das Ausgangssignal des OP1 steuert den Schmitt-Trigger OP2. Über R8 und C1 wird das Ausgangssgnal gefiltert. Wenn sich der Roboter innerhalb der Schleife befindet, entsteht zuerst ein positives Signal an der Spule, der Schmitt-Trigger schaltet am Ausgang nach Masse, 150µs später (das ist die am Sender eingestellte Impulsbreite) kommt dann ein negatives Signal, der Trigger schaltet wieder nach +4V. Das Ganze wiederholt sich bei jedem Impuls und läuft außerhalb der Schleife genau entgegengesetzt ab. Der Schmitttriggerausgang liegt immer fest auf 0V oder auf +4V (rein digitales Signal), je nachdem ob sich der Sensor außerhalb oder innerhalb der Schleife befindet. Das Signal kehrt sich nur für 150µs um, bzw. gibt es beim Überfahren der Schleife einen Signalwechsel. Der Schmitt-Trigger speichert quasi immer die letzte Halbwelle aus der Empfangsspule. Würde der Zustand des Sensors vor dem RC-Glied genau während dieser 150µs abgefragt werden, würde das Signal falsch, "Innen" als "Außen", bzw. umgekehrt interpretiert werden. Das RC-Glied glättet das Ausgangssignal, da die Zeitkonstante viel größer als die Impulsbreite des Senders ist. Das Signal am Ausgang "Puls" kann man z. B. einem Monoflop zuführen, um die Schleifenfunktion zu überwachen. | |
| − | + | ||
| − | [[Bild: | + | [[Bild:signal_184.jpg]] |
| − | + | ||
| − | 2. Variante | + | |
| − | Die Spannung am Ausgang des | + | 2. Variante. Signalauswertung im Mikrocontroller |
| + | |||
| + | Man kann die Bauteile des eigentlichen Sensors reduzieren, wenn die Auswertung des Ausgangssignals des OPV über den ADC des Mikrocontroller erfolgt. Dies erfordert aber, dass das Ausgangssignal des OPV länger andauert, als es zur Ansteuerung des Schmitt-Triggers in Variante 1 erforderlich ist. Die Empfangsschaltung unmittelbar nach der Spule muss hierzu etwas abgeändert werden. | ||
| + | |||
| + | Die Detektorspule liegt wieder zwischen den beiden Eingängen des OPV. Ein Eingang liegt über einen Spannungsteiler an 1/2 Vcc. Der OPV kann deshalb mit 0 und 5 V an –Us bzw. +Us betrieben werden. Eine negative Betriebsspannung ist nicht erforderlich. Ohne Kondensator C würde der Spannungsimpuls nur wenige Mikrosekunden andauern. C und L alleine bilden aber einen Schwingkreis, was eine Wechselspannung am Eingang des OPV zur Folge hätte. Um dies zu vermeiden, wird dieser Schwingkreis durch einen parallel geschalteten Widerstand R gedämpft. Über R2 erfolgt eine negative Rückkopplung auf den -Eingang. Wird keine Spannung in L induziert, stellt sich deshalb am Ausgang ebenfalls etwa 1/2 Vcc ein. R2 / Widerstand der Spule bestimmt in etwa den Verstärkungsfaktor. An- und Abschalten der Spannung an der Induktionsschleife erzeugen jeweils eine, weniger als 0,1 ms dauernde, Spannungsänderung (positiver oder negativer Spike) am Ausgang des OPV. Auch hier ist auf die Polung der Spule zu achten (siehe oben). | ||
| + | [[Bild:Rasenrobo Induktionssensor.JPG]] | ||
| + | Das Ausgangssignal wird im Mikrocontroller über den ADC ausgewertet. Damit sind keine Einstellungen der Schaltung über Potentiometer vorzunehmen. Die Empfindlichkeit wird softwaremäßig über Grenzwerte eingestellt (in u.g. Beispiel durch den Wert 30). | ||
| + | Die Spikes müssen hierzu in einer Programmschleife abgepasst werden. Zu Erläuterung hierzu ein BASIC-Programm zur Verarbeitung von 2 Sensoren. Die Frequenz des Senders muss etwas langsamer sein, als das gesamte Programm durchlaufen wird. Das Programm wartet dadurch in der For-Next-Schleife auf den nächsten Spike. Impulsbreite kann ggf. mitgemessen werden. | ||
| Zeile 78: | Zeile 85: | ||
| − | + | Anmerkung: Die Werte für C und R wurden experimentell bestimmt. Die Schaltung ist erprobt. Trotzdem konnte die Schaltung nicht immer mit Erolg nachgebaut werden, da sich L und C möglicherweise als Schwingkreis verhalten, je nachdem welche Induktivität die Spule genau besitzt. | |
| − | |||
| − | + | '''Tipps zum Ausprobieren der Schaltung:''' | |
| + | |||
| + | Die Funktion des Senders kann getestet werden, indem die Detektorspule direkt mit einem Kopfhörer verbunden wird. Es knattert mit der Frequenz des Senders. Wird der Kopfhörer mit dem Ausgang des OP verbunden, ist dies entsprechend lauter. Ein analoges Voltmeter am Ausgang des OP zeigt die Impulse durch kurze Ausschläge an. Ein digitales Voltmeter zeigt wegen der geringen Impulsbreite möglicherweise keine Spannungsimpulse an. Zum Ausprobieren kann man für die Schleife von einer 25 m Rolle mit Schaltlitze (z.B. 0,14mm^2) etwa 10 m abrollen. Im Freien und für größere Flächen kann man dickere Lautsprecherkabel verwenden. | ||
| + | |||
| + | Elektromotoren und Stromschwankungen in Zuleitungen und Akkus können die Sensoren stören. Bei Motoren ist eine Abschirmung durch Statorbleche möglich. Sehr starke, wechselnde Magnetfelder, z.B. durch brushless Außenläufer können mit Mu-Metallfolie (Permeabilität 8000) abgeschirmt werden. Störungen hängen nicht nur vom Abstand zwischen Störquelle und Sensor ab, sondern auch von deren Anordung. Die Störung ist am stärksten, wenn die Störquelle sich in Richtung der Längsachse der Empfangsspule befindet und am schwächsten, wenn sie "querab" von der Empfangsspule ist. Bei einem Akkupack spielt auch dessen Ausrichtung eine Rolle, da die Akkus miteinander eine Stromschleife bilden. Unmittelbar benachbarte Funkmodule und Sharp-Sensoren können stören. | ||
| + | |||
| + | Ggf. kann man zur Abschirmung elektrischer Felder das Motorgehäuse und das Mu-Metall mit einer starken Aderleitung mit dem zentralen Massepunkt der Stromversorgung verbinden. Weiterhin sollte man die Motorleitungen (Hin- u. Rückleitung) möglichst parallel führen oder verdrillen. Ein dicker ELKO direkt an der Leistungsstufe vermindert die Störungen vom Akku und den Zuleitungen. | ||
| + | |||
'''FAQ:''' | '''FAQ:''' | ||
| − | Warum spricht der Sensor auch in der Mitte einer großen Schleife an ? | + | Warum spricht der Sensor auch in der Mitte einer großen Schleife an? |
| − | Nach dem | + | Nach dem Laplace'schen Induktionsgesetz hängt die Magnetfeldstärke H in der Mitte einer Schleife folgendermaßen vom Schleifenradius R und der Stromstärke I ab: |
| − | H = I / 2 / R | + | H = I / 2 / R. |
H nimmt damit nur umgekehrt proportional zu R ab, und nicht zu R^2. I läßt sich bei Vergrößerung der Schleife konstant halten, wenn der Widerstand durch ein dickeres Kabel entsprechend gesenkt wird. | H nimmt damit nur umgekehrt proportional zu R ab, und nicht zu R^2. I läßt sich bei Vergrößerung der Schleife konstant halten, wenn der Widerstand durch ein dickeres Kabel entsprechend gesenkt wird. | ||
Neben einem geraden Leiter hängt die Magnetfeldstärke wie folgt vom Abstand a ab: | Neben einem geraden Leiter hängt die Magnetfeldstärke wie folgt vom Abstand a ab: | ||
H = I / 2pi / a. | H = I / 2pi / a. | ||
| − | Vergleicht man beide Formeln stellt man fest, dass z.B. die Magnetfeldstärke in der Mitte einer Schleife mit 6 m Durchmesser etwa so groß ist wie in 1 m Abstand von der Schleife. D.h. in den mittleren 2/3 einer Schleife ist das | + | Vergleicht man beide Formeln, stellt man fest, dass z.B. die Magnetfeldstärke in der Mitte einer Schleife mit 6 m Durchmesser etwa so groß ist wie in 1 m Abstand von der Schleife. D.h. in den mittleren 2/3 einer Schleife ist das Magnetfeld relativ homogen. |
| Zeile 102: | Zeile 115: | ||
[http://www.roboternetz.de/phpBB2/viewtopic.php?t=19825&postdays=0&postorder=asc&start=0&sid=cd9f9c9da075acaef9bb2fb04142a83d] | [http://www.roboternetz.de/phpBB2/viewtopic.php?t=19825&postdays=0&postorder=asc&start=0&sid=cd9f9c9da075acaef9bb2fb04142a83d] | ||
diskutiert. Fragen und Kommentare bitte ebenfalls an diesen Thread richten. | diskutiert. Fragen und Kommentare bitte ebenfalls an diesen Thread richten. | ||
| + | |||
| + | |||
| + | |||
| + | |||
| + | [[Kategorie:Praxis]] | ||
| + | [[Kategorie:Elektronik]] | ||
| + | [[Kategorie:Grundlagen]] | ||
Aktuelle Version vom 26. November 2008, 16:39 Uhr
Eine Begrenzungsschleife oder Induktionsschleife wird verwendet, um den Arbeitsbereich eines Roboters festzulegen. Üblicherweise wird diese bei Rasenmäherrobotern eingesetzt. Die Induktionsschleife wird dabei um die zu mähende Fläche verlegt. Ein Roboter kann auch entlang einer Induktionsschleife zur Ladestation geleitet werden.
Funktionsprinzip:
Als Induktionsschleife wird ein Kabel (Schaltlitze, Lautsprecherkabel) verlegt. Die Schleife entspricht damit einer Spule mit einer Windung. An die Induktionsschleife wird mit einer Frequenz von 5 bis 200 Hz für wenige ms (Impulsbreite) eine Spannung von etwa 15 - 25 V angelegt. Damit wird für kurze Zeit innerhalb der Schleife ein Magnetfeld erzeugt. Im Roboter wird als Detektor eine Spule mit hoher Windungszahl verwendet. Der Anstieg des Magnetfeldes induziert in dieser Spule eine Spannung. Die Polarität gibt darüber Auskunft, ob sich die Spule innerhalb oder außerhalb der Schleife befindet. Befindet sich die Spule genau über der Schleife wird keine Spannung induziert. Der anschließende Abfall des Magnetfeldes induziert nochmals eine Spannung in der Detektorspule, deren Polarität aber dem ersten Impuls entgegengesetzt ist.
Entscheidend für die Funktion ist somit nicht das statische Magnetfeld. Hall-Sensoren als Detektoren sind damit ungeeignet. Entscheidend sind ein steiler Anstieg und steiler Abfall des Magnetfeldes, da nach dem Induktionsgesetz die Änderung der Magnetfeldstärke pro Zeiteinheit für die Höhe der induzierten Spannung entscheidend ist. Der Widerstand der Induktionsschleife sollte deshalb wenige Ohm nicht überschreiten. Wichtig ist auch die Polung der Schleife, wenn man die Anschlüsse vertauscht erkennen die Empfänger innerhalb der Schleife "außen" und umgekehrt.
Senderschaltung:
Die Ansteuerung des MOSFET T1 ist über beliebige Timer (NE555, Attiny2313) möglich. Wichtig sind ein Kondensator C3 mit hoher Kapazität (1 bis 10 mF) zur Pufferung der Spannung am Netzgerät, da bei durchgeschaltetem MOSFET fast ein Kurzschluss über die Induktionsschleife vorliegt. Eine Freilaufdiode ist nicht erforderlich, um nach dem Abschalten der Spannung die Induktion von Spannungsspitzen am Netzteil und dem MOSFET zu verhindern. Hierfür reicht in der Regel die im MOSFET bereits eingebaute Diode.

Der Widerstand R5 muss etwas Leistung verkraften können, ein 4W-Typ ist sicher ausreichend. Mit P1 kann man die Impulsbreite einstellen, R3 bestimmt die Wiederholfrequenz. Für C3 sollte man einen LowESR Elko nehmen (oder einen mit höherer Nennspannung) damit er die Stromimpulse liefern kann.
Genauer einstellbar sind Impulsbreite und Wiederholfrequenz, wenn statt des NE555 ein Mikrocontroller verwendet wird. Für eine Impulsbreite von z.B. 2 ms und eine Frequenz von 5 Hz muss T1 über R1 2 ms auf Vcc (high) und 200 ms auf 0V (low) gesetzt werden.
Empfangsschaltung:
1. Variante. Signalauswertung über Schmitt-Trigger

Eine geeignete Detektorspule kann aus einem Relais (z.B. 12 - 24 V, Widerstand etwa 500 Ohm) ausgebaut werden. Der Bügel muss entfernt werden. Die Verstärkung der induzierten Spannung an der Detektorspule erfolgt über einen Operationsverstärker. Die Detektorspule liegt deshalb zwischen den beiden Eingängen des OP1. D1 und D2 begrenzen Spannungsspitzen, um den OPV zu schützen. P1 legt die Empfindlichkeit fest, R4 und R5 bilden eine virtuelle Masse. Wichtig ist auch die Polung der Spule, sonst zeigt der Empfänger innerhalb der Schleife "außen" an und umgekehrt.
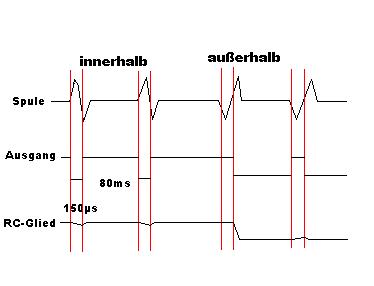
Das Ausgangssignal des OP1 steuert den Schmitt-Trigger OP2. Über R8 und C1 wird das Ausgangssgnal gefiltert. Wenn sich der Roboter innerhalb der Schleife befindet, entsteht zuerst ein positives Signal an der Spule, der Schmitt-Trigger schaltet am Ausgang nach Masse, 150µs später (das ist die am Sender eingestellte Impulsbreite) kommt dann ein negatives Signal, der Trigger schaltet wieder nach +4V. Das Ganze wiederholt sich bei jedem Impuls und läuft außerhalb der Schleife genau entgegengesetzt ab. Der Schmitttriggerausgang liegt immer fest auf 0V oder auf +4V (rein digitales Signal), je nachdem ob sich der Sensor außerhalb oder innerhalb der Schleife befindet. Das Signal kehrt sich nur für 150µs um, bzw. gibt es beim Überfahren der Schleife einen Signalwechsel. Der Schmitt-Trigger speichert quasi immer die letzte Halbwelle aus der Empfangsspule. Würde der Zustand des Sensors vor dem RC-Glied genau während dieser 150µs abgefragt werden, würde das Signal falsch, "Innen" als "Außen", bzw. umgekehrt interpretiert werden. Das RC-Glied glättet das Ausgangssignal, da die Zeitkonstante viel größer als die Impulsbreite des Senders ist. Das Signal am Ausgang "Puls" kann man z. B. einem Monoflop zuführen, um die Schleifenfunktion zu überwachen.

2. Variante. Signalauswertung im Mikrocontroller
Man kann die Bauteile des eigentlichen Sensors reduzieren, wenn die Auswertung des Ausgangssignals des OPV über den ADC des Mikrocontroller erfolgt. Dies erfordert aber, dass das Ausgangssignal des OPV länger andauert, als es zur Ansteuerung des Schmitt-Triggers in Variante 1 erforderlich ist. Die Empfangsschaltung unmittelbar nach der Spule muss hierzu etwas abgeändert werden.
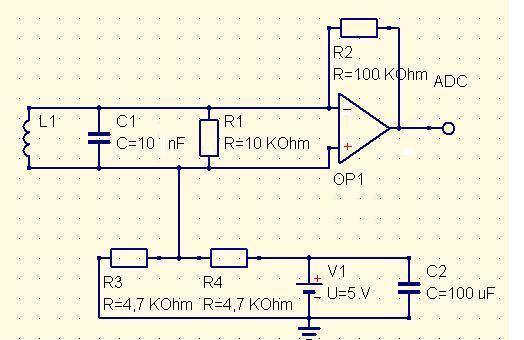
Die Detektorspule liegt wieder zwischen den beiden Eingängen des OPV. Ein Eingang liegt über einen Spannungsteiler an 1/2 Vcc. Der OPV kann deshalb mit 0 und 5 V an –Us bzw. +Us betrieben werden. Eine negative Betriebsspannung ist nicht erforderlich. Ohne Kondensator C würde der Spannungsimpuls nur wenige Mikrosekunden andauern. C und L alleine bilden aber einen Schwingkreis, was eine Wechselspannung am Eingang des OPV zur Folge hätte. Um dies zu vermeiden, wird dieser Schwingkreis durch einen parallel geschalteten Widerstand R gedämpft. Über R2 erfolgt eine negative Rückkopplung auf den -Eingang. Wird keine Spannung in L induziert, stellt sich deshalb am Ausgang ebenfalls etwa 1/2 Vcc ein. R2 / Widerstand der Spule bestimmt in etwa den Verstärkungsfaktor. An- und Abschalten der Spannung an der Induktionsschleife erzeugen jeweils eine, weniger als 0,1 ms dauernde, Spannungsänderung (positiver oder negativer Spike) am Ausgang des OPV. Auch hier ist auf die Polung der Spule zu achten (siehe oben).

Das Ausgangssignal wird im Mikrocontroller über den ADC ausgewertet. Damit sind keine Einstellungen der Schaltung über Potentiometer vorzunehmen. Die Empfindlichkeit wird softwaremäßig über Grenzwerte eingestellt (in u.g. Beispiel durch den Wert 30). Die Spikes müssen hierzu in einer Programmschleife abgepasst werden. Zu Erläuterung hierzu ein BASIC-Programm zur Verarbeitung von 2 Sensoren. Die Frequenz des Senders muss etwas langsamer sein, als das gesamte Programm durchlaufen wird. Das Programm wartet dadurch in der For-Next-Schleife auf den nächsten Spike. Impulsbreite kann ggf. mitgemessen werden.
Dim Svr as integer, Svl as integer, A0 as integer, A1 as integer Dim Max0 as integer, Max1 as integer, Min0 as integer, Min1 as integer Dim I as integer, Impulsbreite as byte Config Adc = Single , Prescaler = Auto , Reference = Internal S0 Alias Getadc(0) S1 Alias Getadc(1) Do Dein Programm . Begrenzungsschleife loop
Sub Begrenzungsschleife A0 = S0 : A1 = S1 'Ausgangswerte der Sensoren (ohne Impuls) Max0 = A0 + 30 'oberer Grenzwert Sensor1 (Einstellung Max1 = A1 + 30 'oberer Grenzwert Sensor2 der Empfind- Min0 = A0 - 30 'unterer Grenzwert Sensor1 lichkeit der Min1 = A1 - 30 'unterer Grenzwert Sensor2 Sensoren) For I = 1 To 2000 Svr = S0 '1. Sensor wird gemessen If Svr > Max0 Or Svr < Min0 Then 'Impuls ausserhalb Grenzwerte Svr = S0 : Svl = S1 : Exit For 'Sensorwerte bei Impuls End If Svl = S1 'gleiches für 2. Sensor If Svl > Max1 Or Svl < Min1 Then Svr = S0 : Svl = S1 : Exit For End If Next For Impulsbreite = 1 To 15 'optional, misst If S0 > Max0 And Svr < A0 Then Exit For 'Impulsbreite, also If S0 < Min0 And Svr > A0 Then Exit For 'bis entgegengesetzter Next 'Spike auftritt Svr = Svr - A0: Svl = Svl – A1 'Differenzen Impuls - Ausgangswerte 'z.B. positiv innen, negativ aussen if i >= 2000 then Notaus 'kein Impuls erfasst, (Schleife kaputt) End sub
Anmerkung: Die Werte für C und R wurden experimentell bestimmt. Die Schaltung ist erprobt. Trotzdem konnte die Schaltung nicht immer mit Erolg nachgebaut werden, da sich L und C möglicherweise als Schwingkreis verhalten, je nachdem welche Induktivität die Spule genau besitzt.
Tipps zum Ausprobieren der Schaltung:
Die Funktion des Senders kann getestet werden, indem die Detektorspule direkt mit einem Kopfhörer verbunden wird. Es knattert mit der Frequenz des Senders. Wird der Kopfhörer mit dem Ausgang des OP verbunden, ist dies entsprechend lauter. Ein analoges Voltmeter am Ausgang des OP zeigt die Impulse durch kurze Ausschläge an. Ein digitales Voltmeter zeigt wegen der geringen Impulsbreite möglicherweise keine Spannungsimpulse an. Zum Ausprobieren kann man für die Schleife von einer 25 m Rolle mit Schaltlitze (z.B. 0,14mm^2) etwa 10 m abrollen. Im Freien und für größere Flächen kann man dickere Lautsprecherkabel verwenden.
Elektromotoren und Stromschwankungen in Zuleitungen und Akkus können die Sensoren stören. Bei Motoren ist eine Abschirmung durch Statorbleche möglich. Sehr starke, wechselnde Magnetfelder, z.B. durch brushless Außenläufer können mit Mu-Metallfolie (Permeabilität 8000) abgeschirmt werden. Störungen hängen nicht nur vom Abstand zwischen Störquelle und Sensor ab, sondern auch von deren Anordung. Die Störung ist am stärksten, wenn die Störquelle sich in Richtung der Längsachse der Empfangsspule befindet und am schwächsten, wenn sie "querab" von der Empfangsspule ist. Bei einem Akkupack spielt auch dessen Ausrichtung eine Rolle, da die Akkus miteinander eine Stromschleife bilden. Unmittelbar benachbarte Funkmodule und Sharp-Sensoren können stören.
Ggf. kann man zur Abschirmung elektrischer Felder das Motorgehäuse und das Mu-Metall mit einer starken Aderleitung mit dem zentralen Massepunkt der Stromversorgung verbinden. Weiterhin sollte man die Motorleitungen (Hin- u. Rückleitung) möglichst parallel führen oder verdrillen. Ein dicker ELKO direkt an der Leistungsstufe vermindert die Störungen vom Akku und den Zuleitungen.
FAQ:
Warum spricht der Sensor auch in der Mitte einer großen Schleife an?
Nach dem Laplace'schen Induktionsgesetz hängt die Magnetfeldstärke H in der Mitte einer Schleife folgendermaßen vom Schleifenradius R und der Stromstärke I ab: H = I / 2 / R. H nimmt damit nur umgekehrt proportional zu R ab, und nicht zu R^2. I läßt sich bei Vergrößerung der Schleife konstant halten, wenn der Widerstand durch ein dickeres Kabel entsprechend gesenkt wird.
Neben einem geraden Leiter hängt die Magnetfeldstärke wie folgt vom Abstand a ab: H = I / 2pi / a. Vergleicht man beide Formeln, stellt man fest, dass z.B. die Magnetfeldstärke in der Mitte einer Schleife mit 6 m Durchmesser etwa so groß ist wie in 1 m Abstand von der Schleife. D.h. in den mittleren 2/3 einer Schleife ist das Magnetfeld relativ homogen.
Die in diesem Artikel vorgestellten Schaltungen entstammen eigenen Versuchen. Es wird deshalb keinerlei Haftung übernommen.
Andere Konzepte und Schaltungen für eine Begrenzungsschleife werden im Forum unter
[1]
diskutiert. Fragen und Kommentare bitte ebenfalls an diesen Thread richten.
