
K |
Ripper (Diskussion | Beiträge) (→Weblinks) |
||
| Zeile 126: | Zeile 126: | ||
==Weblinks== | ==Weblinks== | ||
* [http://www.lancos.com/prog.html PonyProg2000] | * [http://www.lancos.com/prog.html PonyProg2000] | ||
| − | * [http://s-huehn.de/elektronik/avr-prog/avr-prog.htm Ganz einfaches Programmierkabel. Achtung, kein sehr wirksamer Schutz für PC] | + | * [http://s-huehn.de/elektronik/avr-prog/avr-prog-alt.htm Ganz einfaches Programmierkabel. Achtung, kein sehr wirksamer Schutz für PC] |
* [http://savannah.nongnu.org/projects/avrdude/ Freies Programmiertool avrdude] | * [http://savannah.nongnu.org/projects/avrdude/ Freies Programmiertool avrdude] | ||
Version vom 9. September 2010, 23:33 Uhr
Inhaltsverzeichnis
ISP-Dongle - Programmieradapter günstig selbst bauen

Um einen Atmel Controller wie ATMega32 etc. (z.B. im RN-Board RN-Control oder RNBFRA-Board) oder auch einen anderen Atmel Controller programmieren zu können, benötigt man ein spezielles Anschlusskabel mit ein wenig Elektronik. In der Regel hat sich eine Schaltung bewährt, welche am Druckerport des PCs eingesteckt wird. Hier gibt es zwar auch verschiedene einfache Lösungen, die nur mit einigen Widerständen oder Dioden auskommen, von diesen ist aber abzuraten, da ein defektes Board oder ein falsch aufgesteckter ISP-Stecker dann schnell die Druckerschnittstelle beschädigen können.
Besser sind Lösungen mit einem Bustreiber.
Eine bewährte Schaltung ist folgende:

Eine solche Schaltung schützt den Druckerport und erlaubt die zuverlässige und schnelle Programmierung der meisten Atmel Controller, wahlweise direkt aus dem Basic Compiler Bascom heraus oder mit dem ebenfalls oft genutzten Übertragungsprogramm PonyProg. Der Dongel ist STK200/300 kompatibel, funktioniert also mit vielen Programmen.
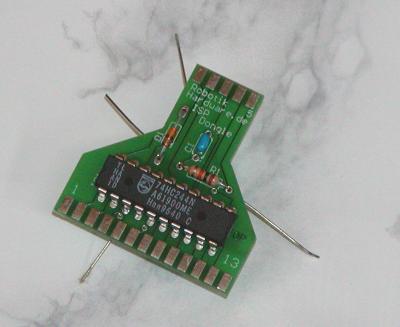
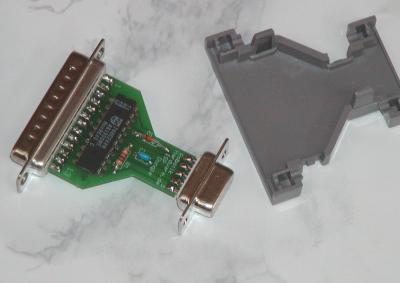
Besonders günstig und einfach lässt sich die Schaltung mit einer speziell geformten Platine aufbauen. Durch die geformte Platine lassen sich nämlich sowohl Stecker als auch Gehäuse sehr leicht montieren. Zudem sind Fehler beim Aufbau der Schaltung fast unmöglich.
Insgesamt benötigt man nur wenige Bauteile:
1 Stück Platine (über www.robotikhardware.de für ca. 6.06 Euro erhältlich) 1 Stück Widerstand 100 k 1 Stück Kondensator 100 nF 1 Stück Diode z.B. 1N4148 oder ähnlich 1 Stück IC 74HC244 1 Stück 9 pol SUB D-Buchse 1 Stück 25 pol SUB D-Stecker 1 Stück 9 pol SUB D Stecker zum aufpressen auf Flachkabel 1 Stück 10pol Wannenstecker zum aufpressen auf Flachkabel 1m Flachkabel 9 polig 1 Stück Universal Sub D-Gehäuse
Der 1. Schritt besteht darin, dass man gleich alle Bauteile in die Platine einsteckt und so biegt, dass diese beim Umdrehen und Einlöten nicht herausfallen.
Das Löten ist eigentlich bei den wenigen Bauteilen keine große Kunst und sollte von jedem Laien in wenigen Minuten erledigt sein.
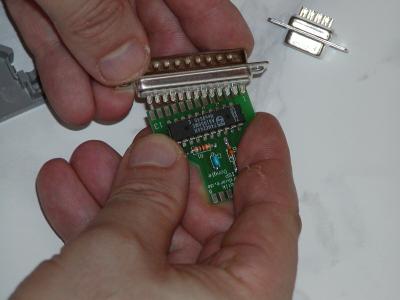
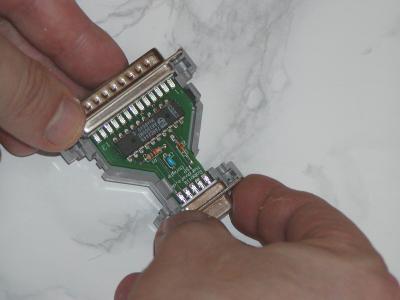
Nun werden die SUB-D-Stecker einfach direkt auf die Platine gesteckt. Und zwar so, dass die Platine genau zwischen der oberen und unteren Reihe liegt. Dabei sollte man darauf achten, dass die Kontakte auf den verzinnten Lötflächen liegen.
Am besten legt man die Platine mit den aufgesteckten Steckern schon einmal in das Gehäuse, um die Passgenauigkeit zu überprüfen. Man variiert also gegebenenfalls die Steckerposition um 1 mm, falls es noch nicht 100%ig passt.
Großes Bild [[1]]
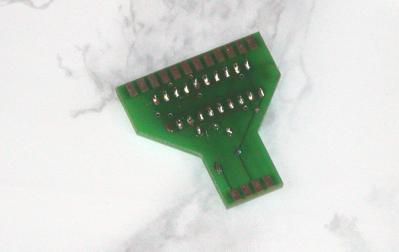
Jetzt kann man die Kontakte einfach verlöten. Dabei sollte man das Lötzinn etwas neben den Kontakt halten, damit dieses auch darunter fließen kann. Auch das ist in ca. 2 bis 3 Minuten sehr einfach zu erledigen. Gelötet sieht das Ganze dann so aus:
Nun kann man das Gehäuse einfach zusammenstecken. Jetzt benötigen wir aber noch ein Anschlusskabel für das Roboter- bzw. Experimentierboard. Da hier ein 10-poliger Wannenstecker üblich ist, benötigen wir also diesen und einen SUB-D-Stecker und etwas Kabel (9-polig).
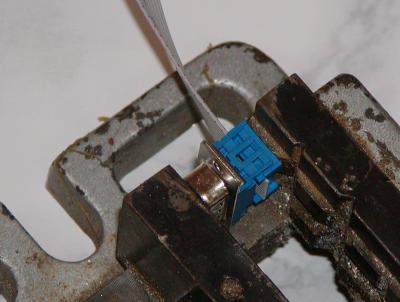
Besonders einfach lassen sich hier die Stecker nutzen, die man einfach auf das Flachkabel aufpresst. Zuerst wird das Kabel wie auf dem Bild eingelegt und der hintere Teil am Stecker etwas zusammengedrückt.
Eigentlich benötigt man nun eine spezielle Zange, um den Stecker gleichmäßig zusammenzudrücken, damit er wirklich gerade in die Adern einschneidet. Aber da nur wenige ein solches Werkzeug besitzen, kann man sich zum Beispiel auch mit einem Schraubstock oder dergleichen behelfen.
Wichtig ist nur, dass man die Stecker gleichmäßig und langsam zusammendrückt.
Auf der anderen Seite montieren wir nun auf die gleiche Weise den 10-poligen Wannenstecker. Dabei ist darauf zu achten, dass Pin 1 (der rot markierte Draht am Flachkabel) an der Stelle sitzt, wo ein Pfeil auf dem Stecker erkennbar ist.
Auch diesen Stecker kann man mit einem Schraubstock oder Maschinenschraubstock pressen.
Das war es schon. Unser perfektes ISP-Kabel ist fertig und sollte so aussehen:
Das hier geschilderte Programmierkabel funktioniert mit den meisten Entwicklungsumgebungen und Programmiertools. Einige Tools sind unten unter Weblinks aufgeführt.
Je nach Programmier-Software kann/muss ein anderes AVR-ISP Programmierkabel verwendet werden, denn das Kabel muss natürlich zur Programmier-Software und dessen Schnittstellenansteuerung passen. Einer der bedienungsfreundlichsten Programmer ist bereits in der Entwicklungsumgebung von Bascom integriert.
Siehe auch
Weblinks
- PonyProg2000
- Ganz einfaches Programmierkabel. Achtung, kein sehr wirksamer Schutz für PC
- Freies Programmiertool avrdude
Bezugsquellen
- Platine Shop http://www.robotikhardware.de
- Fertiger Dongle http://www.shop.robotikhardware.de/shop/catalog/product_info.php?cPath=73&products_id=41
Vorsicht: robotikhardware ist nicht empfehlenswert. Kein Tel.Support, nur AB mit Ansage.
E-Mail's werden erst nach 3-4 Werktagen beantworted.
Lieferung dauert über 10 Tage (Danke Hermes)
Bauteile :


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[1]](http://www.robotikhardware.de/bilder/isp/isp6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
